引文信息:
Rakesh Rayapureddi & Santanu Mitra. Novel Hydrodynamic Analysis Towards Capabilities Improvement of Bio-inspired Underwater Vehicles Using Momentum Redistribution Method. Journal of Bionic Engineering, 2022, 19(2),314–330
Novel Hydrodynamic Analysis Towards Capabilities Improvement of Bio-inspired Underwater Vehicles Using Momentum Redistribution Method
Rakesh Rayapureddi & Santanu Mitra
Mechanical Engineering Department, Shiv Nadar University, Delhi-NCR, 201314, Noida, India
Abstract
This paper presents an efficient and versatile OpenFOAM (Open-source Field Operation And Manipulation)-based numerical solver for fully resolved simulations that can handle any rigid and deforming bodies moving in the fluid. The algorithm used for solving Fluid–Structure Interactions (FSI) involving the immersed structure with changeable shapes is based on the momentum redistribution method. The present approach excludes the need to solve elastic equations, obtain high-accuracy predictions of the flow field and provide a rigorous basis for implementing the Immersed Boundary Method (IBM). The OpenFOAM implementation of the algorithm is discussed along with the design methodology for developing bio-inspired underwater vehicles using the present solver. The computational results are validated with the experimental observations of the two-dimensional and three-dimensional anguilliform swimmer case studies. The study further extended to the three-dimensional hydrodynamics of a bioinspired, self-propelling manta bot. The motion of the body is specified a priori according to the reported experimental observations. The results quantify the vortex formation and shedding processes and enable the identification of the portions of the body responsible for the majority of thrust. The body accelerates from rest to an asymptotic mean forward velocity of 0.2 ms−1 in almost 5 s, consistent with experimental observations. It is observed that the developed computational model is capable of performing any motion simulation and manoeuvrability analysis, which are critical for the designers to develop novel unmanned underwater vehicles.
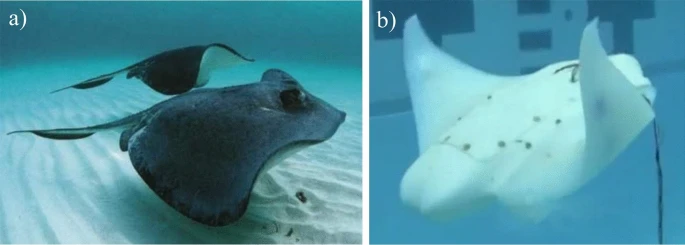
Fig. W1 a Undulatory motion observed in batoids (Manta Rays) . b Manta droid built by National University of Singapore
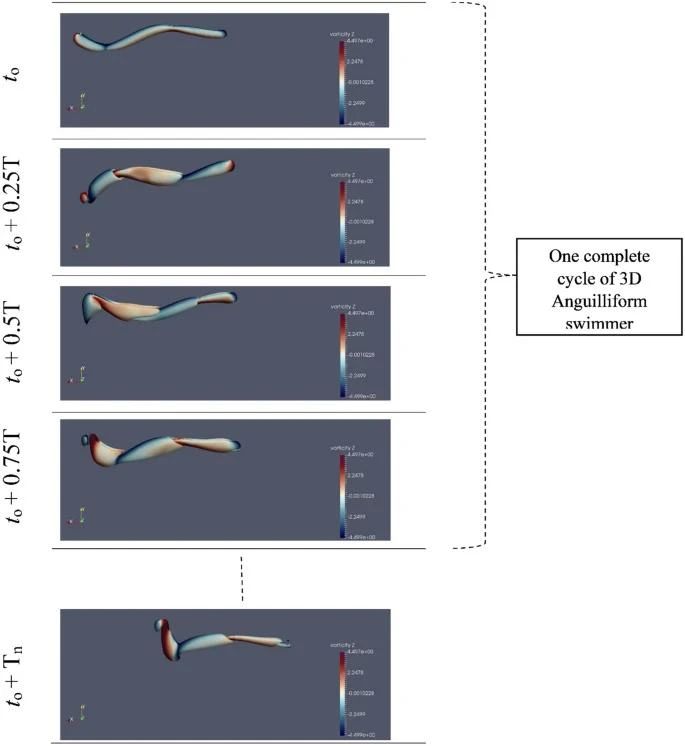
Fig. W2 Flow field formation for the 3D anguilliform swimmer in fluid domain in four undulations cycle
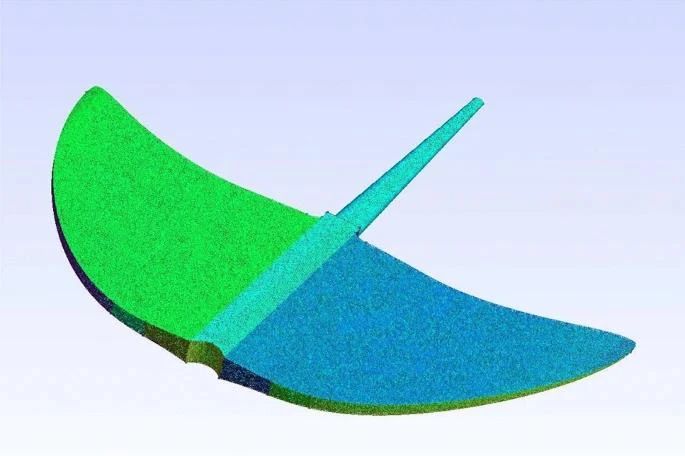
Fig. W3 3D cad model of manta bot and body meshing
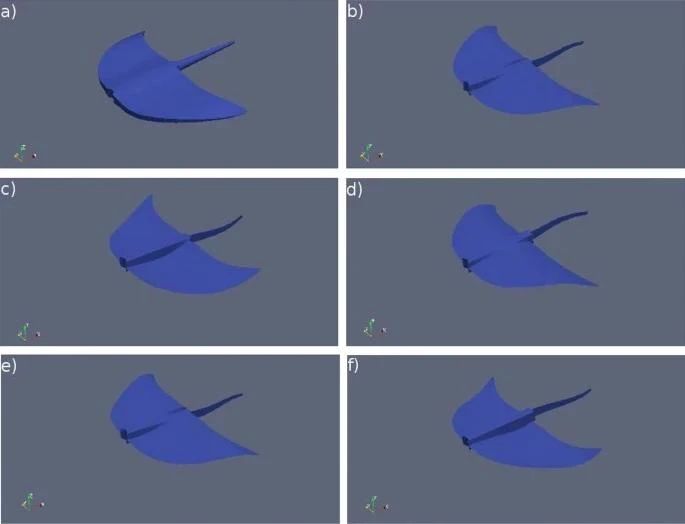
Fig. W4 Undulation motion of manta fins recorded at different time steps, a at t = 0; b, c the power stroke; d steady gliding; e, f the return stroke
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
Information Publisher: Rakesh Rayapureddi & Santanu Mitra
Information Release Unit: Mechanical Engineering Department, Shiv Nadar University
Information Source: https://rdcu.be/cJqQP
