国际仿生科技平台

自然界中飞行生物利用扑翼飞行方式能够获得优异性能以满足生物多样的生存需求或复杂的力学与功能要求。受这一启发的仿生扑翼飞行机器人是一种模仿飞行动物的机器人,通过机翼上下扑动产生动力源和通过尾翼调节飞行姿态,同时将升力,推力和悬停集成在一个扑翼系统内。与传统固定翼或旋翼飞行机器人相比,具有灵活性强,覆盖范围广和隐蔽性强等优点,并能完成许多其他飞行机器人无法执行的特定任务。因此,在民用和国防领域有着十分重要的应用。例如,利用仿生扑翼飞行机器人可以进行生化探测与环境监测,以此实现在生化禁区执行任务;可以对森林、草原和农田上的火灾、虫灾及空气污染等生态环境进行实时监测;可以进入人员不易进入地区,如地势险要战地,失火或出事故建筑物中等;特别在军事上,仿生扑翼飞行器可用于战场侦察、巡逻、突袭、信号干扰及进行城市作战等。因此,仿生扑翼飞行机器人的研究是非常有意义和价值的。
仿生蝙蝠飞行机器人
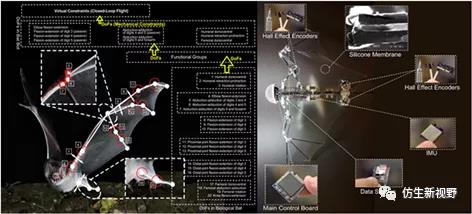
图1 仿生蝙蝠飞行机器人(https://www.science.org/doi/10.1126/scirobotics.aal2505,A biomimetic robotic platform to study flight specializations of bats,DOI:10.1126/scirobotics.aal2505)
仿生扑翼飞行机器人的研究一直是人们关注的热点,涉及机械工程、材料工程、微电子工程、控制理论、多传感器集成、新能源、图像识别、人工智能等多种交叉学科。这里,小编总结了几款受自然飞行生物(如蝙蝠、飞鸟、蜻蜓、蜜蜂和蝴蝶等)启发的仿生扑翼飞行机器人,仅供学习交流。
自然界中,蝙蝠以其无与伦比的敏捷性和机动性吸引了科学家和工程师,通过多功能的动态机翼结构能够实现这一目标。如图1所示,蝙蝠翅膀复杂的功能群,利用功能群可以对蝙蝠飞行时四肢的复杂运动进行分类和提取主要的自由度并将它们结合到蝙蝠的飞行动力学中。直接模仿蝙蝠的40多个自由度将使得机器蝙蝠无法实现起飞,为了实现这一目标,研究人员通过一系列的机械约束和虚拟约束实现自由度的约束,最终自由度限制为五个,但也保留了蝙蝠57%的飞行动力学性能。自由度分别设置在肩部、肘部、腕部、腿部和尾部。而翼膜采用了硅基碳纤维加强膜,厚度仅有56μm轻薄且强度高。通过机械耦合,一个直流无刷电机驱动左右翼同时进行扑翼飞行。利用空心杯电机控制其余自由度的调整。在每一个关节处还放置了霍尔编码器以监测关节的运动角度。同时利用IMU来监测飞行的姿态。整个飞行器的MCU为STM32M4,并通过DSM2接收机和蓝牙与地面基站通信。整个飞行器重93g,但可达到10Hz的扑翼频率。
仿生飞鸟飞行机器人

图2 仿生飞鸟飞行机器人(https://www.science.org/doi/abs/10.1126/science.335.6075.1430,A Flapping of Wings,DOI:10.1126/science.335.6075.1430)
如图 2所示,德国 Festo 公司的研究人员通过银鸥飞行特点的观察研制了仿飞鸟飞行机器人Smartbird。提出利用对称扑动的四杆机构叠加一个二级杆组模仿银鸥的扑动动作,以此更接近模仿大型鸟类的飞行动作。由于 Smartbird 采用碳纤维材料制作的双段翼构型实现了低速稳定的飞行和更好的滑翔性能,可复现海鸥翅膀的折叠扑动运动,且提高了飞行时的能量利用率,有助于提高续航时间。
仿生蜻蜓飞行机器人

图3 仿生蜻蜓飞行机器人(https://journals.sagepub.com/doi/full/10.1177/1756829317734837,Dove: A biomimetic flapping-wing micro air vehicle, DOI:10.1177/1756829317734837)
如图3所示,仿生蜻蜓飞行机器人“Bionicopter” 只有175g,翼展可达到0.63m,体长0.44m,其传感器、制动器、机械零件都紧凑装配在开放和闭合环路控制系统中,并能够精确匹配。Bionicopter拥有四个翅膀由四个振幅控制器分别控制,使得每个翅膀都能够做 90°的旋转,且每秒可拍打20次,可以在空中悬停,也可以不拍打翅膀,利用超轻重量的身体实现滑翔飞行,同时尾巴采用多自由度的线驱动尾巴,拥有极强的运动能力,在飞行或者选定时,可以通过尾巴的摆动平衡身体,使得它拥有极强的灵活性。因此,Bionicopter几乎可以实现类似蜻蜓的所有运动特征。
仿生蜜蜂飞行机器人
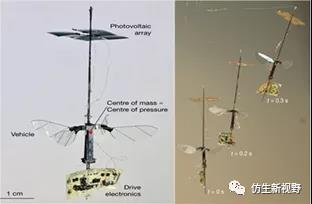
图4 仿生蜜蜂飞行机器人(https://www.nature.com/articles/s41586-019-1322-0, Untethered flight of an insect-sized flapping-wing microscale aerial vehicle, DOI: 10.1038/s41586-019-1322-0)
如图4所示,仿生蜜蜂飞行机器人RoboBee 有四个由压电执行器驱动的翅膀,跨度仅为 3.5 厘米。为了给机翼提供电源,太阳能电池安装在机翼上方。太阳能电池产生的低电压(约 5 V)随后被转换为高电压(约 200 V),驱动机翼所需的时变信号电力电子设备集成在机翼下方。完整的集成系统长约 5 cm,重量仅为 259 mg。仿生蜜蜂飞行机器人RoboBee能够模仿蜜蜂的飞行能力,比其他飞行机器人(如固定翼或旋翼飞行机器人)更加灵活和机动,其推力效率与蜜蜂相当。目前,这是最轻的飞行机器人。
仿生蝴蝶飞行机器人

图5 仿生蝴蝶飞行机器人(https://www.festo.com/group/en/cms/10216.htm)
如图5所示,由德国的 Festo 设计的仿生蝴蝶飞行机器人“emotion butterfly”,由碳纤维机身、柔性翅膀、微型舵机、高密度锂电池和微型控制器等构成。碳纤维机身具有良好的强度和轻质量特点,利用翅膀的扑动提供充足的动力,利用舵机驱动代替齿轮传动保证了运动的可靠性且降低了机构的复杂程度,高密度锂电池能够为飞行器的飞行提供足够的电量,进而实现长时间的飞行。微型控制器内部的姿态传感器能够实现姿态校准且根据室内定位能够实现室内的自主飞行。
综上所述,仿生+扑翼飞行机器人具有飞行效率高,隐蔽性好,成本低,机动性强等特点,在地形勘探、环境监测、灾后救援以及侦察追踪等方面有着重要的应用价值与潜力。但目前仿生扑翼飞行机器人的主要研究大部分集中在机械结构设计、翅翼优化、硬件、控制系统等方面,其空气动力学、路径规划、稳定性、智能化等仍然面临诸多挑战。将来,随着仿生技术和材料技术的快速发展使得仿生扑翼飞行机器人更具有仿生化和智能化。
以上文章转载于微信公众号仿生新视野,如有侵权请及时联系我们修改或进行删除。