国际仿生科技平台

人手作为人体与外界交互的最主要器官,其具有出色的灵活性、适应性和功能多样性,除了得益于其复杂的神经感知及控制系统,手部自身的骨骼肌肉系统及其内在的生物力学优势也发挥着不可或缺的作用。然而,人们对其强大功能的底层结构材料基础和生物力学机制了解并不深,还缺少较为系统有效的方法来深入研究人手各功能结构的具体生物力学优势。
为了揭开这个奥秘,团队基于人手肌肉骨骼系统,设计开发了具有多层结构的刚柔耦合仿生灵巧手指,其具备类似人手的仿生韧带关节、伸肌腱网络以及柔性腱鞘系统,并验证了韧带式关节可以带来各向异性可变关节刚度(符合人手特征)、网状伸肌腱结构可以增大指尖可行力空间(相比于线性伸肌腱平均增大146.4%)、柔性腱鞘结构可以增大指尖力速工作空间(相比于刚性腱鞘平均增大117.5%)的生物力学优势。得益于这些内在优势,团队基于该灵巧手指构建的三指仿生灵巧手样机展现了与人手类似的抓取成功率(接近人手的94%)。该研究有望揭示人手强大功能背后的生物力学基础,并启发高性能仿生灵巧手的设计开发。该研究作为两篇系列论文,分别以“An Anthropomorphic Robotic Finger With Innate Human-Finger-Like Biomechanical Advantages Part I: Design, Ligamentous Joint, and Extensor Mechanism”和“An Anthropomorphic Robotic Finger With Innate Human-Finger-Like Biomechanical Advantages Part II: Flexible Tendon Sheath and Grasping Demonstration”为题,连续发表在IEEE TRANSACTIONS ON ROBOTICS上。


仿生灵巧手指结构设计
人手指具有多层结构,内部的硬质骨骼被外部的多层软组织包裹起来。受此启发,设计构建了具有多层结构的刚柔耦合仿生灵巧手指,包括第一层的骨骼和软骨,第二层的关节韧带和关节囊,以及第三层的肌腱和腱鞘(图1)。其骨骼模型通过CT扫描真实人手骨骼逆向成形,并通过高精度树脂3D打印,以保证材料强度及与人手骨骼形状的高相似度;关节软骨由带有聚四氟乙烯(PTFE)涂层的柔性玻璃纤维胶带构成,可以在不破坏关节表面原始形状的条件下提供关节润滑条件;灵巧手指以聚对苯二甲酸乙二醇酯(PET)纤维编织带作为人工韧带,其微观“折叠”结构及非线性应力应变特性与人体韧带很类似;关节囊及柔性腱鞘采用液体硅胶(硬度Shore A13)通过模具固化成形,关节囊表面设计有类似人手关节囊的褶皱结构,可以减少拉伸应力及弯曲时的堆积,腱鞘内部布有直径1.58mm的聚四氟乙烯(PTFE)软管为肌腱运动提供光滑通道;手指由两根屈肌腱驱动关节弯曲,包括指浅屈肌腱(FDS)和指深屈肌腱(FDP),背部的伸肌腱网络根据“温斯洛菱形肌腱模型”编织成形,连接着长伸肌腱(LE)、尺骨间肌腱(UI)和桡骨间肌腱(RI),共同驱动着手指伸展及侧摆等动作,肌腱均采用高强度聚酯涤纶纤维线,其直径0.43mm, 可承受30磅拉力。总体来看,团队设计的仿生灵巧手指与人手指在结构上高度相似,这使得其展现出与人手指类似的生物力学优势和功能表现成为可能。
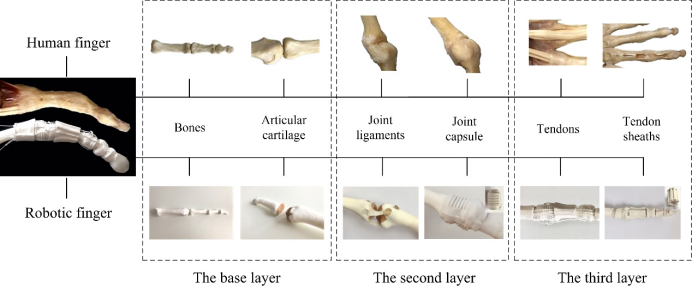
图1 仿生灵巧手指多层结构设计
三大生物力学优势探究
在以往对人手的解剖研究中,人们逐渐发现人手指关节的刚度是随着其角度姿态不断变化的,这种关节刚度的自可变性可以为人手与外界的多样交互提供合适的刚度条件,而其中韧带式关节结构起到了主要作用。为了验证这一点,作者建立了韧带式关节数学模型,并对灵巧手指掌指骨(MCP)关节刚度进行实际测试,理论与实验结果均标明,在手指屈伸(图2a)及外展内收方向(图2d)上,掌指骨关节的刚度均会随着关节的弯曲角度产生非线性变化,在大部分的角度范围内,关节刚度维持在较低水平,保证了关节运动的灵活性,而在较大关节弯曲角度下,关节刚度会迅速上升,如紧握绳索时,这样的高关节刚度可以部分抵消手指为了抓住绳索而产生的侧向力,从而减弱手部肌肉的疲劳。
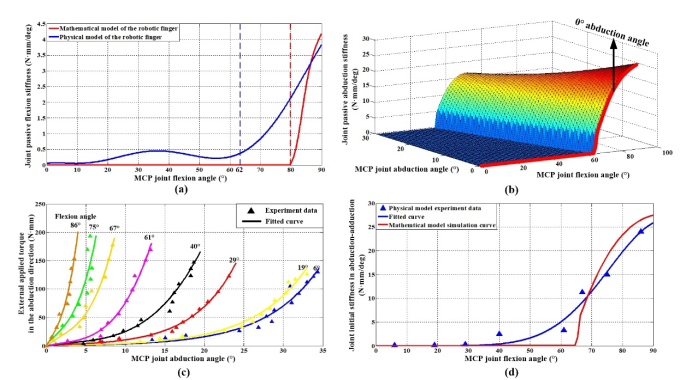
图2 仿生灵巧手指MCP关节刚度理论与实验结果
关于人手指伸肌腱网络,以往通过解剖及计算机仿真的研究中都发现了其可以调节优化手指肌腱力传递的作用,并对指尖可行力空间产生影响,但同样缺少实验验证。为了弥补该空白,作者建立了灵巧手指运动学简化模型,利用Minkowski求和算法,对比了在线性伸肌腱与网状伸肌腱条件下,同等肌腱力输入获得的指尖可行力空间输出,并对带有这两种不同结构伸肌腱的灵巧手指在三种姿态下的指尖力进行测量,理论与实验结果均标明,相比于线状伸肌腱,网状伸肌腱结构可以明显增大指尖可行力空间,理论上平均增大了30.9%(图3d-f),而实验中则平均增大了146.4%(图3g-i)。指尖可行力空间的增大有益于手指在各个方向上都能够施加足够的力,这在手指与不确定、不规则环境的交互中显得尤为重要。
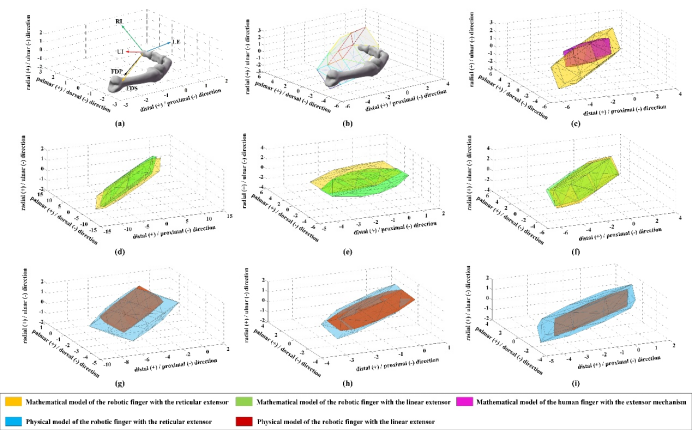
图3 线状与网状伸肌腱仿生灵巧手指可行力空间理论与实验对比结果
其他研究发现,手指腱鞘结构的损伤会导致手指部分功能丧失,尤其是施加力的能力减弱,其实手指在与外界的动态交互过程中,柔性腱鞘起到了重要作用,其根据肌腱力大小产生的自适应形变,调节着手指的力与速度工作特性,但鲜有研究证实这一点。作者将此作为研究重点,建立柔性腱鞘下的手指肌腱驱动模型,并对比2mm、4mm和6mm不同直径的刚性腱鞘,分析手指准静态及动态力速特性,同时采用快速释放实验法,对带有柔性及不同直径刚性腱鞘的灵巧手指模型进行力与速度测量,发现相比于刚性腱鞘,柔性腱鞘不仅可以提高手指准静态的力与速度施加能力(图4g),还可以增大手指动态力速工作空间,理论上力速工作空间平均增大了41.2%(图4d),实验结果则显示平均增大了117.5%(图4f)。动态力速工作空间的增大,可以使手指在更大范围内实现从“小力高速”模式调节到“大力低速”模式,如快速抓住棒球,从而满足不同交互环境对手指力与速度的需求。
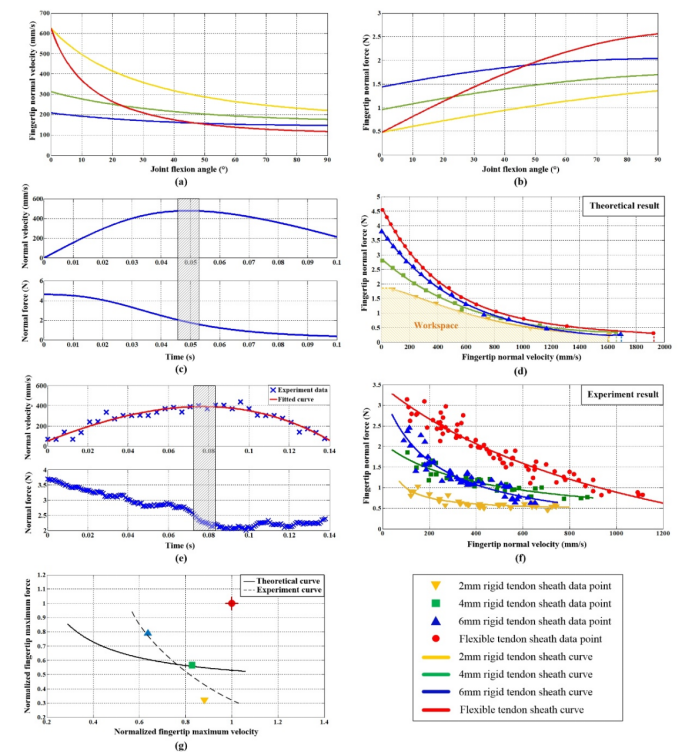
图4 刚性与柔性腱鞘仿生灵巧手指力速工作特性理论与实验对比结果
三指仿生灵巧手抓取表现
基于设计的仿生灵巧手指,作者搭建了三指仿生灵巧手系统,灵巧手由12个Dynamixel MX-12W电机驱动,采用前馈位置控制算法实现抓取动作。同时制作三类仿生手对比模型,在其他结构不变的情况下,分别替换成销轴关节结构、线状伸肌腱结构以及刚性腱鞘结构,对比测试人手以及各类仿生手在三种表面五种目标物体条件下的抓取能力(图5a,b)。实验结果显示,原始仿生灵巧手平均抓取成功率接近人手的94%,而相比于原始仿生手,采用销轴关节、线状伸肌腱及刚性腱鞘的仿生手对比模型抓取成功率则分别平均下降了10%、6%和17%(图5d),表明采用的韧带关节、网状伸肌腱以及柔性腱鞘结构均不同程度的对手指抓取能力起到强化作用,进一步验证了作者提出的仿生设计方法及研究结论。
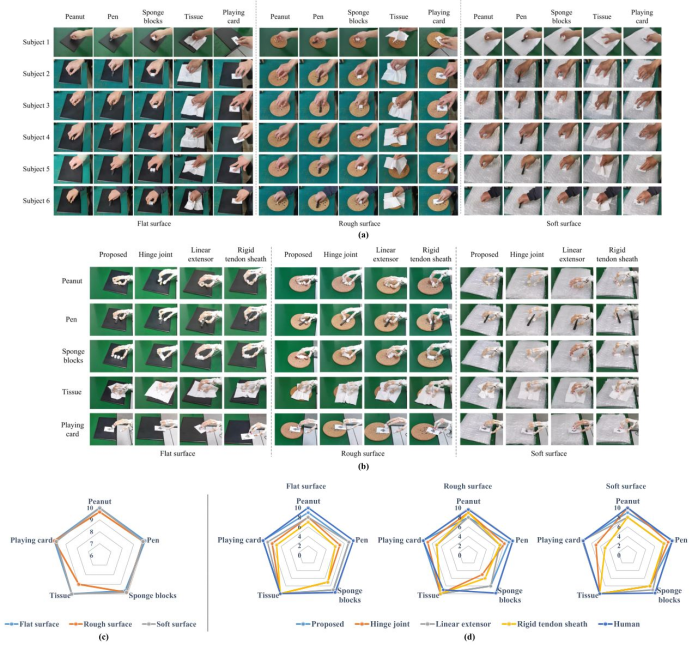
图5 人手及仿生灵巧手在三种表面五种目标物体下的抓取测试结果
总结:韧带式关节、伸肌腱网络及柔性腱鞘所带来的生物力学优势是人手实现强大功能的重要基础,若能将这些结构应用在未来仿生灵巧手的开发设计上,有望进一步提升灵巧手的性能,使其更好的为人类服务,研究具有重要的理论意义和广泛的应用价值。
论文第一作者为朱一鸣,博士毕业于英国曼彻斯特大学,现就职于国防科技大学智能科学学院,论文通讯作者为曼彻斯特大学/吉林大学任雷教授和索尔福德大学魏国武教授。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。