连续体机器人相较于以工业机器人为代表的离散机器人和具有更多运动学可执行自由度的超冗余自由度机器人不同,它表现出大量的运动学自由度,但并不是所有的自由度都是可以直接驱动的。对于连续体机器人其设计灵感主要来源于自然界的脊椎和无脊椎动物,如蛇、象鼻、八爪鱼和动物尾巴等。
近期,南京航空航天大学吉爱红教授课题组展示了一种新型分层驱动连续体蛇形机器人,结构上模拟蛇的“S”形几何运动形态,采用由多个刚性关节单元构成的连续体关节单元相互串联而成。各刚性关节单元采用钢丝绳牵引驱动。该连续体仿蛇形机器人可建立精确的运动学模型具有较高的位置精度和负载能力。基于分层驱动原理实现单个连续体关节单元内的多个刚性体关节单元空间内转角同步运动,结构紧凑,可显著降低逆运动学解、末端驱动箱及控制系统的复杂性。将本文所设计连续体仿蛇形机器人应用范围拓展,对满足工业生产、航空航天、核设施的定期检测和维护具有重要意义。
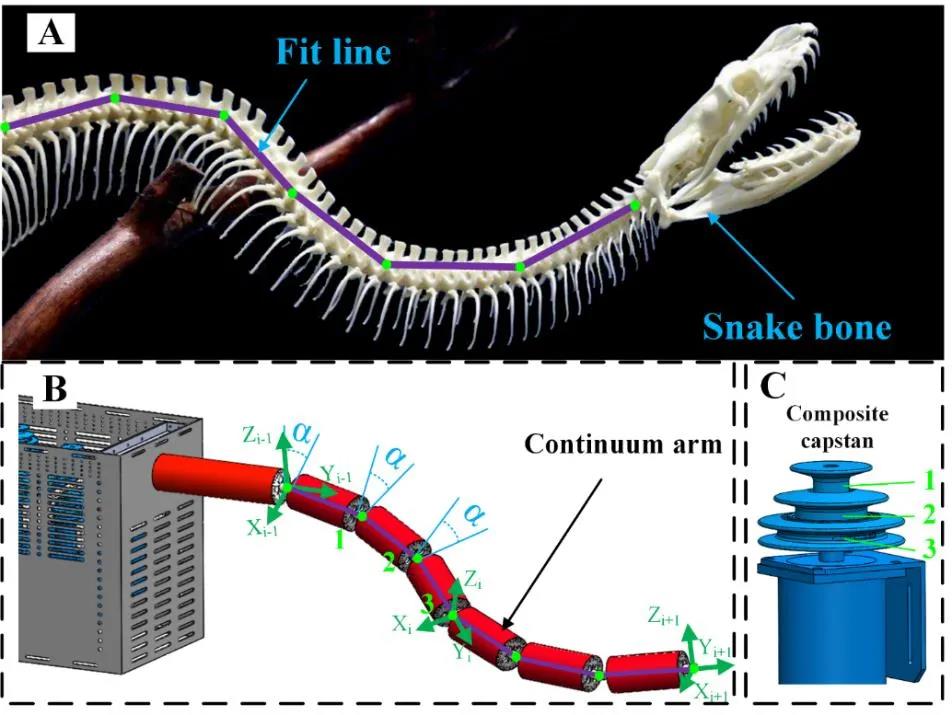
图1. 连续体仿蛇形机器人构型设计通过模拟蛇的运动形态设计连续体机器人.(A)蛇的骨骼结构呈现“S”运动构型;(B)连续体仿蛇形机器人样机模型(由两部分构成:末端驱动箱、和连续体蛇形臂:包含两个连续体关节单元,每个连续体关节单元由三个刚性体关节单元构成,采用分层驱动原理实现空间内转角同步设计);(C)驱动电机上安装的复合驱动绞盘可同时牵引多跟钢丝绳实现连续体的空间转角同步控制。
制作连续体蛇形机器人样机如图2A所示,主要由驱动箱和多个串联的连续体关节单元构成。驱动箱内安装有伺服电机和复合绞盘,用于牵引钢丝绳控制连续体关节单元的动作;每个连续体关节单元由3个串联的刚性关节单元构成如图2B所示,每个刚性体关节单元通过沿圆周均布的三根钢丝绳牵引驱动如图2F所示。因此对于每个包含3个刚性体的连续体关节单元共须9根钢丝绳,每个刚性关节单元分层固结3根钢丝绳进行牵引驱动。钢丝绳穿线布局如图2F所示,其中蓝色、红色和绿色分别表示每个关节单元固结钢丝绳的位置,如图2C-2E所示最外侧绿色钢丝绳固结在第一个刚性体关节单元,中间红色钢丝绳固结在第二个刚性关节单元,最内侧蓝色钢丝绳固结在第三个刚性关节单元。为实现单个连续体关节单元内的三个刚性体关节单元空间内转角同步运动,通过直径不同的复合绞盘如图2G所示进行驱动,绞盘沿轴向布置有3个一体化设计的直径各不相同的钢丝绳绕线槽,从上到下依次驱动绿色、红色、蓝色三根钢丝绳,钢丝绳依次穿过某个连续体关节单元,并从后往前依次将绿色、红色、蓝色三根钢丝绳固结在连续体关节单元内的第一、二、三个串联刚性关节单元上,实现单个连续体关节单元内的三个刚性体关节单元空间内转角同步运动。
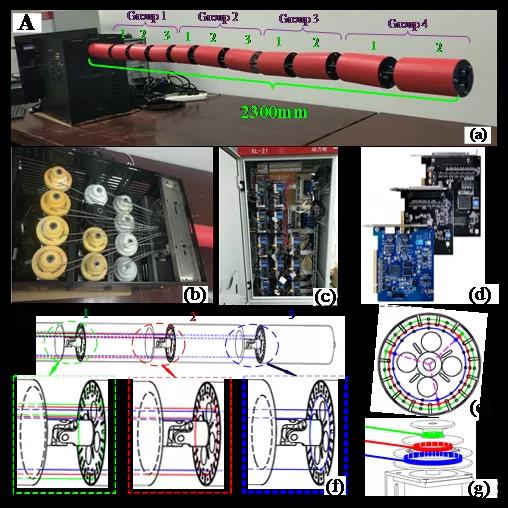
图2. 连续体仿蛇形机器人结构示意图:(A)连续体仿蛇形机器人整机;(B)单个连续体关节包含三个刚性关节单元,采用万向节相互串接;(C)第一个刚性关节单元由3根夹角相差120°蓝色钢丝绳牵引;(D)第二个刚性关节单元由3根夹角相差120°红色钢丝绳牵引;(E)第三个刚性关节单元由3根夹角相差120°绿色钢丝绳牵引;(F)刚性关节单元截面图中绿色红色和蓝色圆周上分布的通孔依次为第一第二和第三刚性关节牵引钢丝绳的通孔;(G)伺服电机带动的复合绞盘从上到下依次驱动第一第二和第三刚性关节的牵引钢丝绳。
优点:该连续体仿蛇形机器人由若干连续体关节通过万向节串接构成,具有超冗余的自由度,可以保持较高的避障能力及足够大的灵巧操作空间。单个连续体关节包含3刚性关节,通过万向节串接而成,相邻刚性关节单元具有空间内转角同步的特性。其设计优势在于:1、位置精度高:各个连续体关节单元所包含的3刚性关节单元受牵引钢丝绳控制,空间内转角同步且位姿实时可控,具有刚性机器人特点位置精度较高;2、负载较大:由于各个连续体关节单元具有刚性机器人的特点,所以在钢丝绳承载能力范围内可承受较大负载;3、驱动及控制系统简化:连续体关节单元和复合绞盘的结构设计使得各刚性关节空间内转角同步,相比于超冗余自由度机器人可成倍数降低末端驱动电机数目提高总弯曲曲率,简化运动学模型降低控制系统复杂性提高运算效率。
蛇机器人各关节组的驱动线缆分布和静力学特性分析如图3所示。通过假设任意关节缆索的最小牵引力为1 N,则缆索可以始终保持紧绷,忽略摩擦和处处挠性变形。设定端部极限载荷为5kg,通过力平衡、力矩平衡和等效变换,即可完成蛇形机器人各牵引索的静力分析。静力特性可以指导驱动元件的选择和极限力优化研究。
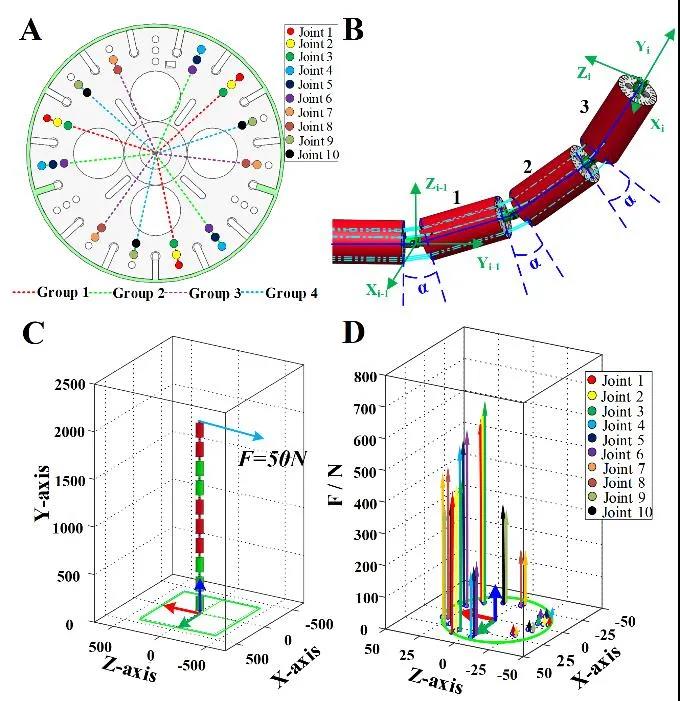
图3.(A)关节单元在截面上的线缆分布,(B)单个关节组各关节角同步运动。(C)端部载荷设定,(D)各关节的线缆受力。
作者使用徕卡激光跟踪测量系统测量蛇机器人的不同臂长和轨迹下的跟踪误差如图4所示各轴跟踪误差均小于15 mm。设置不同的载荷来测量位置误差和重复定位精度。通过激光跟踪测量系统测量手臂长度为1500mm的蛇机器人在不同载荷下的末端位置误差和重复定位精度。测量不同载荷下蛇机器人完成相同的水平摆动轨迹,得到沿Z轴的位置误差如图5B所示。在70 s内达到摆动限位角时,最大位置误差为15 mm。测量不同载荷下蛇机器人进行5次垂直摆动轨迹,端部重复定位精度测量结果显示最大平均绝对位置误差(ME)为11 mm。
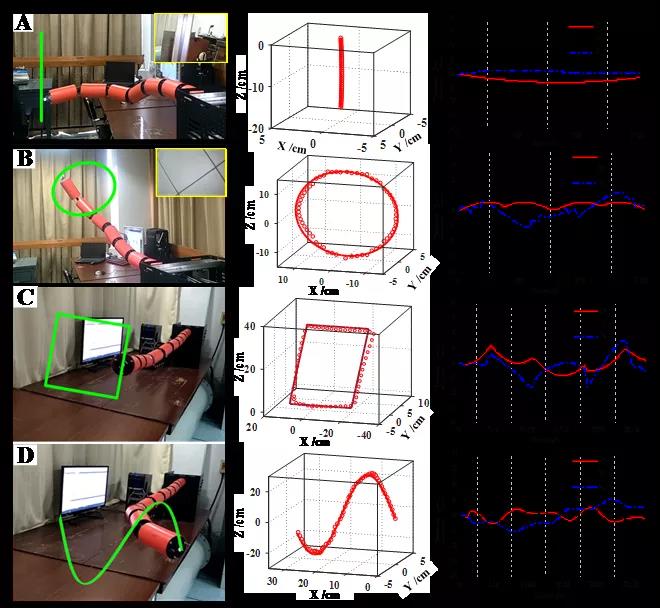
图4.蛇机器人轨迹规划及误差分析。(A)、(B)为手臂长度为1500mm的蛇机器人轨迹规划及误差分析,(C)、(D)为手臂长度为2300mm的蛇机器人轨迹规划及误差分析。
通过陀螺仪角度传感器测量手臂长度为2300mm的蛇机器人各关节组的空间旋转角度数据,如图5所示。结果表明蛇形机器人运动平稳,关节角无振荡。多次实验测得蛇臂末端关节组沿三坐标轴的最大重复关节角误差为(0.63°,0.81°,0.31°)。
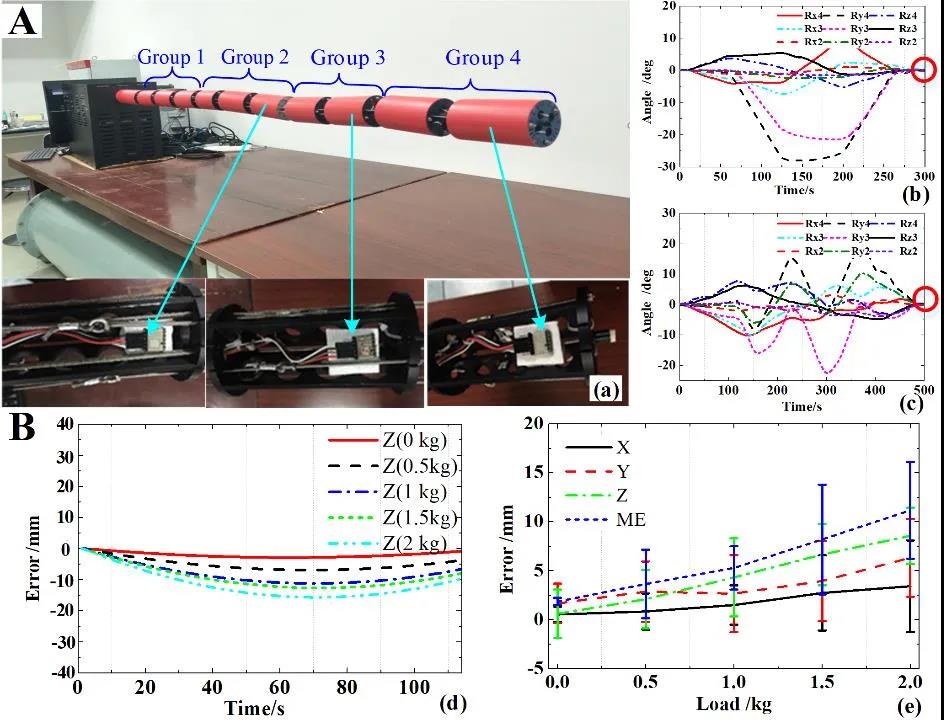
图5. 蛇机器人定位精度实验。(A)关节角度测量实验,(a)每个角度传感器,(b)和(c)是每个角度传感器在矩形轨迹和正弦轨迹的试验结果。(B) 不同的负载下误差实验,(d)蛇臂末端的位置误差, (e)蛇臂重复定位精度。
从以上实验结果和补充材料可以看出,整个运动过程是平稳的,没有振荡和噪声,流畅性好。在开环逆运动学轨迹规划过程中,臂长1500mm的蛇机器人终点最大位置误差为12mm,臂长2300mm的蛇机器人终点最大位置误差为18 mm。产生误差的主要原因有:1.基于分层驱动的连续体设计机器人是一种欠驱动构型,各关节组需要高精度的协调运动能力,钢丝绳的柔性变形和复合绞盘直径的微小变化使位置误差变大。2. 在重力作用下,蛇机器人的缆索受力不均匀,导致蛇机器人各关节位置存在静态误差。此外,开环控制的逆解误差会影响多个电机的协调运动,导致末端位置误差较大。对于位置误差较大的蛇形机器人,可以采用非线性最小二乘算法对末端位置误差进行补偿,以提高位置精度。总的来说,分层驱动蛇形机器人具有简化的驱动和控制系统。与传统的柔性连续体机器人相比,它具有更强的承载能力和位置精度,能够建立精确的运动学模型。能够满足CFETR等狭窄空间下的视觉和导航使用需要。
在未来,蛇形连续体机器人的应用还将不断完善。进一步在机器人开环位置误差的基础上增加补偿算法,以提高位置精度。进一步研究层驱动蛇形机器人的轨迹跟踪和主从遥操作控制算法,以提高其在极端狭窄的工作环境中的操作能力。
以上研究成果以“A Snake-Inspired Layer-Driven Continuum Robot”为题,发表在Soft Robotics上。南京航空航天大学博士研究生秦国栋为论文第一作者,南京航空航天大学吉爱红教授和中科院等离子体所程勇副研究员为论文共同通讯作者,研究生秦国栋为论文第一作者。该研究工作得到中国国家重点研发项目(2019YFB1309604)和国家磁约束聚变科学项目(2017YFE0300503)的资助。
(以上文章来源于微信公众号国际仿生工程学会)
