打开家里的一个柜子,自然的双手交叉,关掉家里的水龙头,有多难?
然而在人类看来的“轻而易举”,却是很多机器人无法跨越的“难题”,目前市场上传统的刚性机械手臂都无法做到。
如何让机器人更像人,拥有更灵活的操作,更优良的人机交互性能,而不是只适用于重复性劳动工作?
中科深谷助力山东大学最新研究的新型柔性机器人给出了答案。
更灵敏、更安全的柔性仿生机械臂
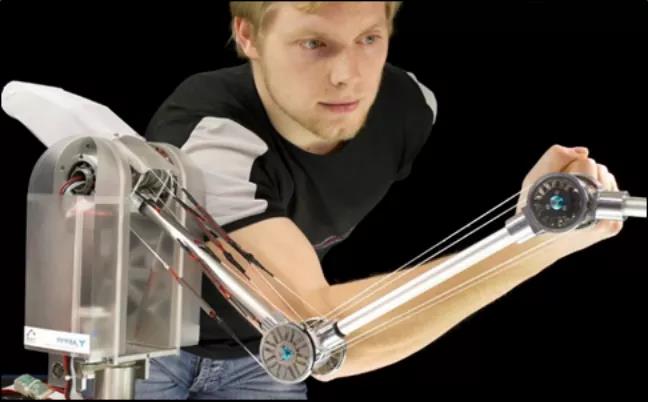
山东大学面向海洋、航天、国防、公共安全、家庭服务等领域对仿生机器人的重大需求,提出一种混合驱动的仿人机械臂系统。其设计思路是将四自由度线驱动机械臂结构与二自由度机器人关节模组巧妙结合构成六自由度混合驱动仿生机械臂。
与传统机器人要求稳定性,对灵活性和自适应性要求不高,只需要按照规划好的路径运动就可以,不用有很多的变化相比,山东大学新型柔性机器人最大的特点就是柔软。
中科深谷先进技术,助力打造高要求控制系统
柔软意味着机器人的进步,它代表山东大学新型柔性机器人拥有更加柔软的“身体”,在实际应用场景更安全、灵敏,人机交互性更强。对复杂环境更具适应性。
如何赋能新型柔性机器人利用更“柔软的身体”完成更多复杂任务,这就对“大脑”即控制系统就有了更高的要求。
“我在今年二月份偶尔一次机会看到陈现敏博士关于《高效率开发机器人电控系统》的讲座了解到中科深谷在机器人控制系统领域拥有成熟先进的技术,在很多工业项目上都有成功的应用,经过较长时间的项目交流,于今年5月下旬正式启动山东大学新型柔性机器人电控系统开发项目。”
1、 MBD工程开发方法 提升50%开发效率
在新型柔性机器人的开发中,如果用传统的开发方式需要经历项目设计、概念构架、立项、运维、验证等环节,过程繁琐、流程复杂,且时间、人力、物力成本都很高。
中科深谷采用基于模型设计(Model-Based Design,简称MBD)的开发方法,打破原有的产品开发思路,将设计任务从实验室和现场转移到电脑桌面,改变研究人员原有的产品开发方式,是一种解决复杂控制、信号处理和算法设计验证等工程问题的数学和可视化方法,通过MBD工程开发方法,提高山东大学新型柔性机器人的开发效率,降低研发成本。
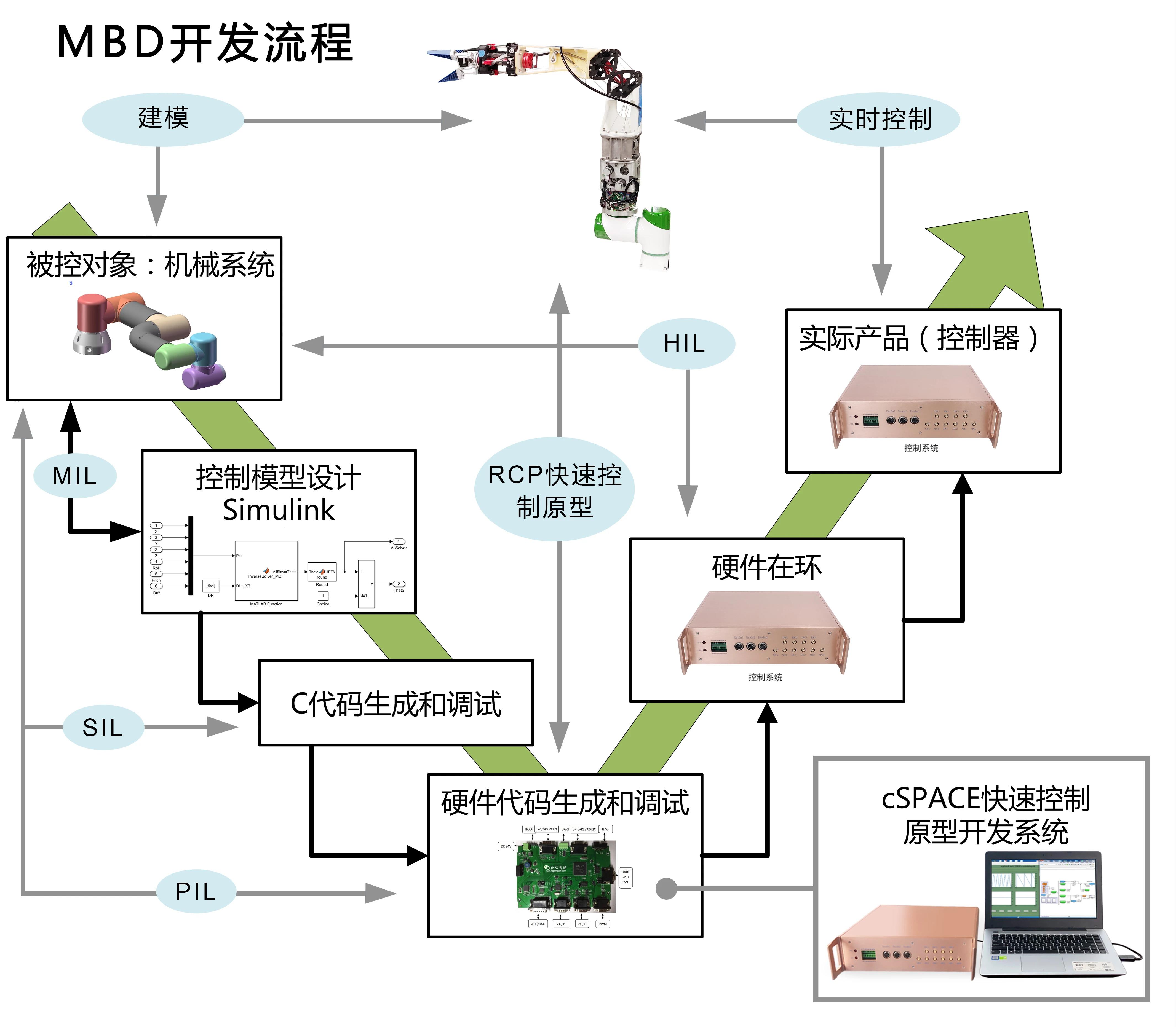
(MBD开发流程图)
2 、“超级控制器”赋能新型柔性机器人开发
基于ROS的新型柔性机器人电控系统主要由计算机、机械臂、CSPACE控制与半实物仿真系统、深度相机(RealSense D435)、视觉标定板和视觉识别对象六部分构成。
对标德国d-SPACE的国产“超级控制器”—CSPACE控制与半实物仿真系统由中科深谷基于TI DSP和MATLAB/Simulink全自主创新研发。拥有AD、DA、IO、Encoder、PWM、CAN、SCI、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。

(CSPACE半实物与仿真系统)
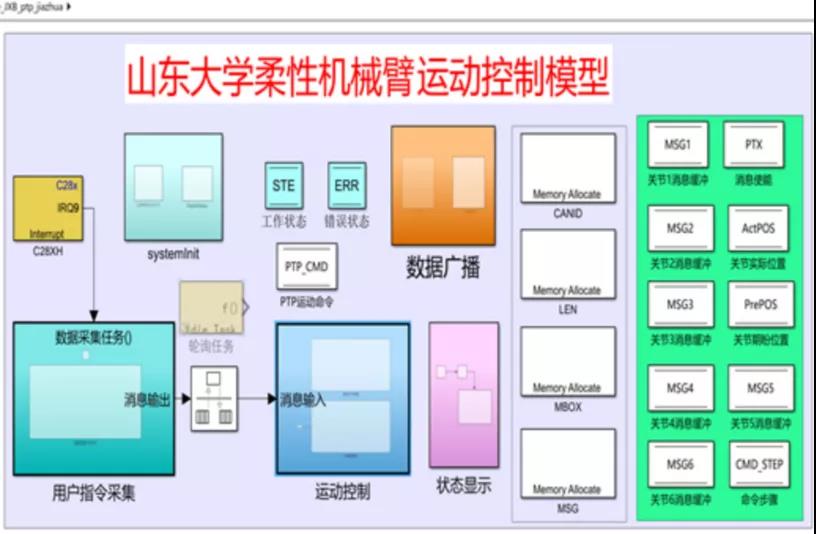
在新型柔性机器人的研发中利用中科深谷多年计算机仿真和嵌入式实时控制技术积累,采用自主研发设计的高性能伺服驱动器,快速匹配关节模组电机,结合CSPACE实现机器人控制系统硬件在环回路(HIL)和快速控制原型(RCP)的功能。

(机械臂上位机软件界面)
其实现功能具体体现在新型柔性机器人在Matlab/Simulink仿真模型到嵌入式控制原型的自动转换和新型柔性机器人控制器通过CAN总线高效稳定控制各个关节模组,还可以通过在线调参来动态验证新型柔性机器人运动控制性能等各方面实际场景应用。
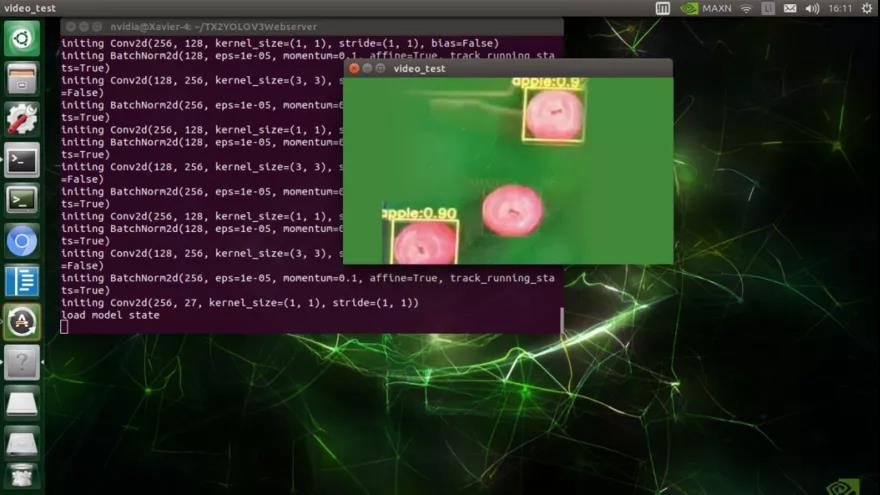
视觉部分通过在机械臂上搭载中科深谷柔性夹爪和深度学习视觉平台,实现目标物体的定位与识别,同时结合机械臂控制器,实现目标物体的抓取。
此之外机器人本体上还可以增加丰富的力与视觉传感器使原来示教-执行的开环执行过程,变为能够与环境动态交互的智能闭环执行过程,以达到与环境和人安全、准确交互的目的。
以上文章转载于中科深谷,如有侵权,请及时联系我们修改或进行删除。
