传统基于螺旋桨驱动的水下机器人承担着水下资源探测、环境勘察等任务,但它们通常存在体积大、成本高、噪音大,对水下生物及其生存环境存在惊扰和危害等问题。为与生物实现和谐相处、安全交互,保证自然环境不被破坏,亟需开发各种水下软体机器人,其中最为关键的环节在于实现柔性驱动。液态金属由于具备良好的导电性和流动性,可在任意改变形状的同时保证自身的目标性能,正被快速应用于皮肤电子等对材料顺应性要求比较高的领域。在研发各类水下机器人的道路上,仿生工程学一直是一个重要途径,这其中水母尤其以其奇妙的移动方式吸引了全世界的关注,激发了学术界对此类软体机器人技术的不懈探索。然而,迄今为止有关液态金属水母机器人的研究却鲜有报道。
在上述态势下,中科院理化所液态金属实验室近年来启动了全柔性液态金属仿生机器水母的研究,所开发的原型曾在首届中国液态金属柔性感知机器人大赛中(云南曲靖,2020.11)亮相并斩获奖项,成果引发CCTV《生活圈——院士说科技》栏目高度重视,并于2020年12月以专题“这个水母,竟是机器人”进行了详细解读和报道。近日,在以往研发基础上,研究小组首次系统地论述了集合全柔性电磁线圈与磁体相互作用的液态金属机器水母的理论与技术,开发出运动和推进方式比较接尽自然的仿生机器水母,并将其命名为LM-Jelly。这一机器水母结构和外形十分柔顺,设计成本低,由完全柔软的电磁致动器驱动,在不同电信号下做出响应时,可实现各种轻柔的游动。作者们基于进一步的概念实验和计算流体动力学模拟,系统解释了这种机器水母的响应机制,以及控制其运动行为的各种因素,包括漩涡的形成和上升、下潜、悬浮等方式。此外,研究还展示了机器水母负载微型摄像机以完成水下监测任务和实现远程传递图像的功能。生物学效应试验则表明,由于LM-Jelly的运行十分柔和自然,对生物无害,可以与水下生物友好共处。这项研究有助于拓宽液态金属仿生机器人在水下资源探察、环境监测等领域的应用,成果以“LM-Jelly: Liquid Metal Enabled Biomimetic Robotic Jellyfish”为题发表在国际期刊《Soft Robotics》(https://doi.org/10.1089/soro.2021.0055)上,文章第一作者为中科院理化所博士生叶姣,通讯作者为刘静研究员。
如图1所示,对没有尾流喷射的水母的运动加以分析,可以发现决定其运动的部位是底部与流体接触的面。受水母启发,可将水母的运动简化为底部伞膜的运动。为了驱动LM-Jelly,科研人员设计了一种由嵌入伞形Ecoflex膜中的永磁体和液态金属线圈组成的软电磁执行器,其工作原理如下:当交流电施加于液态金属线圈,薄膜会受到不同方向的洛伦兹力,从而实现收缩和舒张的连续交替。当液态金属线圈加载顺时针方向的电流时,LM-Jelly的伞膜在舒张阶段克服重力并在洛伦兹力的作用下展平。相反,当加载逆时针方向的电流时,伞膜则受到向下的力,即进入收缩阶段。
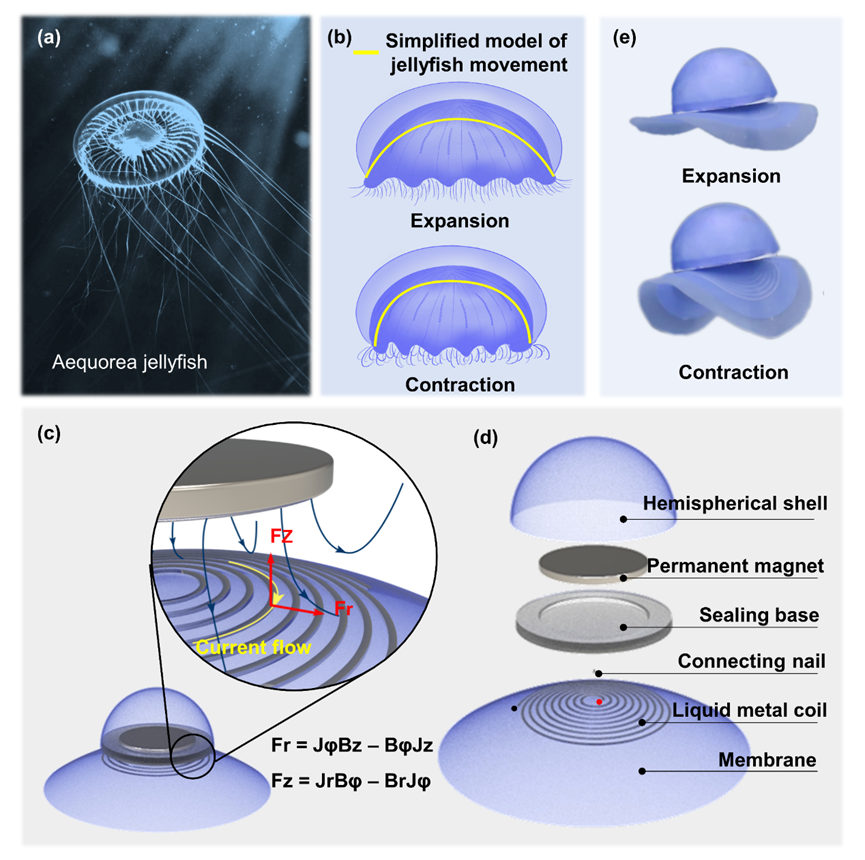
图1 液态金属仿生机器水母LM-Jelly的工作原理及柔性执行器制造方法
如图2所示,当对液态金属线圈施加不同信号的电流时,LM-Jelly会对应呈现出不同的运动状态。水母运动的性能由速度表征,其快慢主要由LM-Jelly的Ecoflex薄膜运动的幅度和频率有关,由输入电压信号的参数决定,包括幅度、占空比和频率等。在电压为7.5 V、占空比为70%、频率为0.8 Hz的最佳输入信号下,LM-Jelly的位移如图2a所示,平均速度保持在6 mm/s。
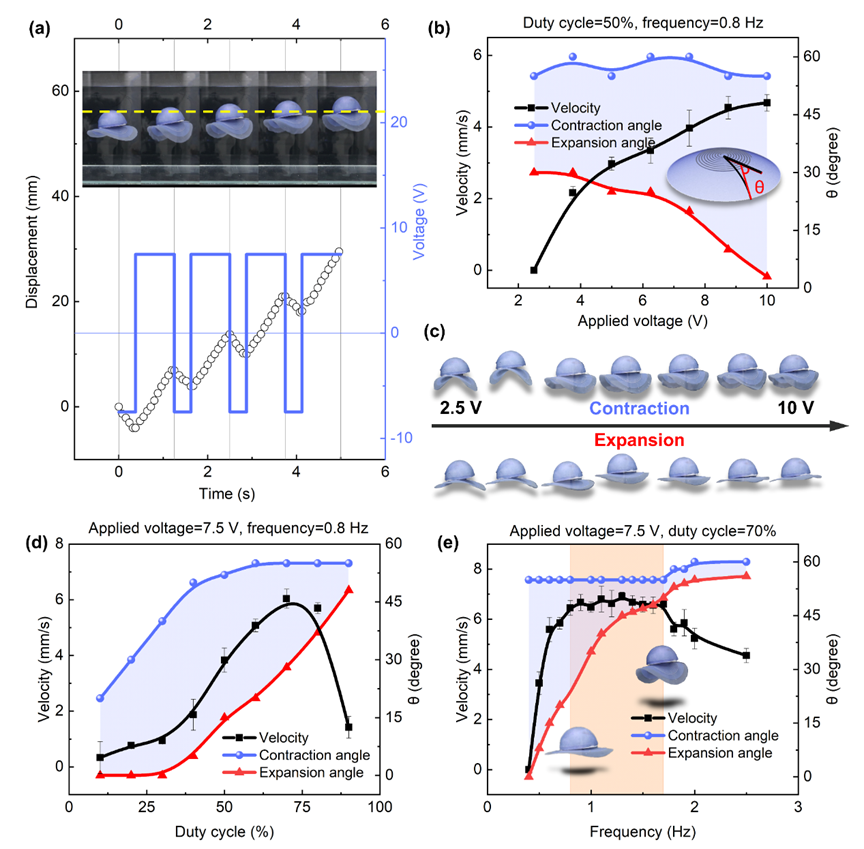
图2 不同参数下LM-Jelly的运动情况
为进一步探索LM-Jelly的工作原理,文章对具体的驱动过程和运动行为进行了模拟,如图3所示。结果表明,LM-Jelly的伞膜在收缩过程中,其形式如同滑桨一样,在边缘的下方会形成向内的涡流,这与实际场景下的涡流相似。正是这种划动流体时产生的阻力为LM-Jelly的运动提供了推力,使其能够上升。而在舒张阶段,LM-Jelly的运动则受到阻碍并由于重力的作用开始下降。这些模拟研究可为液态金属机器水母进一步优化提供支撑。
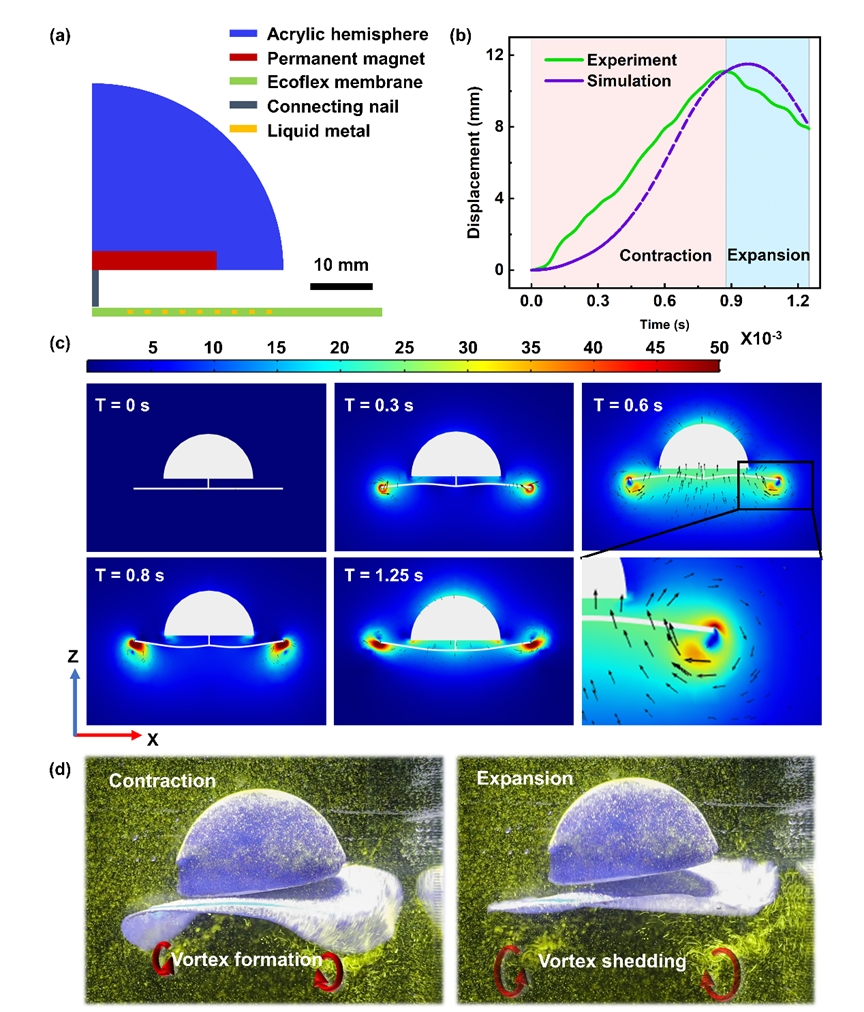
图3 LM-Jelly运动的模拟
为评估液态金属机器水母LM-Jelly在水下环境工作时对生物是否具备友好性,作者们特别将数条小型热带鱼投入LM-Jelly所在水箱,以观察其所受影响情况。结果表明,与传统螺旋桨驱动的机器人相比,液态金属机器水母的运动不会改变热带鱼运动的轨迹,而与此形成鲜明对比的是,当螺旋桨驱动的机器人启动时,周围小鱼会出现尽快远离的情形,这说明液态金属机器水母具有优良得多的温和性。文章进一步研究了液态金属机器水母用于水下监测方面的实际价值,可以看到,携带摄像头的LM-Jelly,将拍摄到的水下环境图像以无线方式传回陆地接受装置的显示屏幕上,这在水下作业和探测方面较具实用价值。
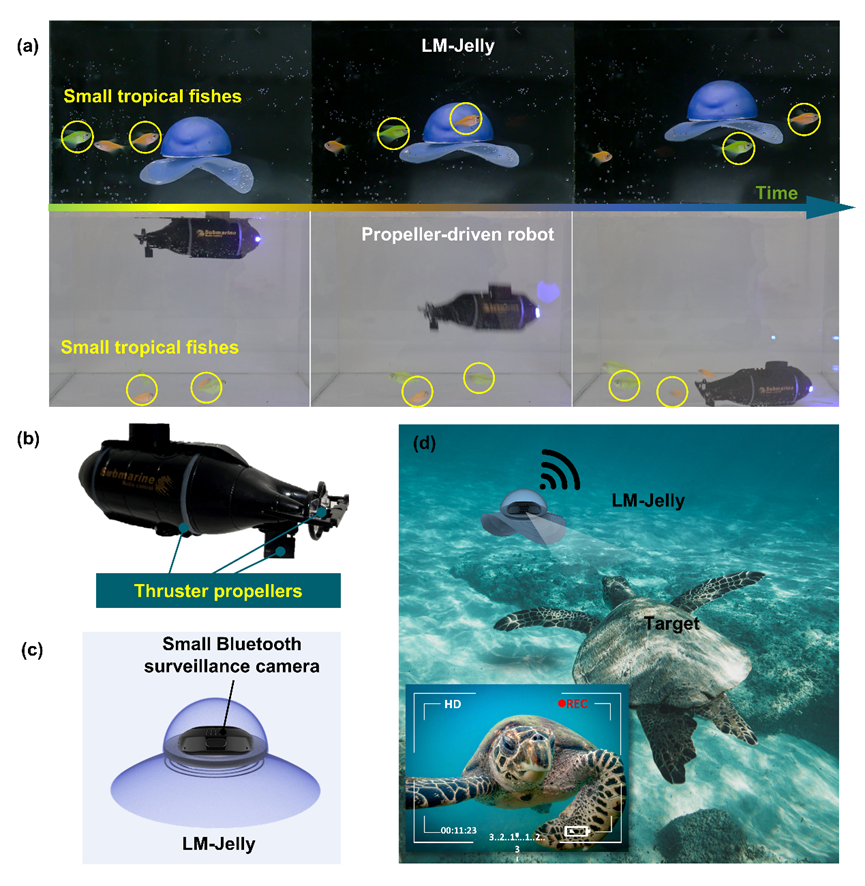
图4 液态金属机器水母LM-Jelly的环境相容性及水下监测实验
总结:文章首次提出并展示了通过集成液态金属柔性响应单元和电磁驱动的仿生机械水母LM-Jelly,其运动可以通过施加在液态金属线圈上的信号加以调节,在磁场中,液态金属通电线圈受到洛伦兹力的作用,可以驱动伞膜在水中形成收缩和舒张。而流体的反作用力可用以推动水母向上运动。由于LM-Jelly动作轻柔,可以很好地与容易受到惊吓的水下生物和谐相处,这对于传统的刚性机器人来说通常是一件很难的事情。更重要的是,LM-Jelly制作和驱动简单,无需额外的刚性运动部件,借助一个全柔性的执行器来实现运动。接下来,围绕 LM-Jelly升级版,可望进一步提高其运动速度以及实现各种灵巧控制,并发展出更多机器人系列。这种液态金属水母的成功制备,为今后实现先进实用的水下柔性机器人提供了一条可行的路径和新的愿景。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
