近年来,触觉传感器由于灵敏的感知能力、优异的可拉伸性能和机械性能等特征被广泛应用于机器人、假肢和人机交互。为了实现智能精准的操控,触觉传感器应具备在宽压力范围内表现出高灵敏度、高压力分辨率以及快速响应的性能。目前,触觉传感器通常由四种传感机制实现压力感知,分别为电容效应、压阻效应、压电效应和摩擦电效应。其中,柔性压阻传感器因其制造简单、响应时间快、串扰低及稳定性好等优异的性能应用最为广泛。然而,传统的柔性压阻传感器仅依靠感知材料自身体积的变化而产生电阻变化,这导致其灵敏度低、压力响应范围窄。微/纳结构(金字塔、圆顶、圆柱、多级分层和仿生结构)的引入虽然有效地提高传感器灵敏度,但也仅限于小压力范围。此外,压力分辨率是传感器的一个非常重要的参数,它决定了传感器对小压力变化的检测能力,但在触觉传感器中却被忽略了。因此,实现在大压力范围内具有高灵敏度、高压力分辨率性能的触觉传感器具有重要意义。

基于上述问题,哈尔滨工业大学胡平安教授团队受人体皮肤结构的启发,提出了沿薄膜厚度方向具有梯度弹性模量特征的梯度孔结构聚二甲基硅氧烷(PDMS)薄膜(图1)。并通过高压蒸汽法和溶胀填充法的结合开发了一种可批量制备梯度孔结构PDMS/CNTs复合薄膜的技术(图2)。由于梯度孔结构薄膜具有高的结构压缩性和应力适应特性,基于梯度孔结构复合薄膜构筑的触觉传感器有效提高了传感器各传感性能,表现出了3.74 kPa-1的高灵敏度,0.06%的超高压分辨率,0-800 kPa的宽响应范围,15 ms的快速响应时间,1.65 Pa的低检测限以及优异的循环稳定性(图3)。在此基础上,扩展的8×8传感器阵列平台展现了精确的实时压力映射和多点触摸功能(图4)。因此,基于梯度孔结构的触觉传感器为人工智能设备实现高性能触觉感知提供了新的途径。该工作以“Skin-inspired tactile sensor based on gradient pore structure enable broad range response and ultrahigh pressure resolution”为题发表于国际知名期刊《Chemical Engineering Journal》。
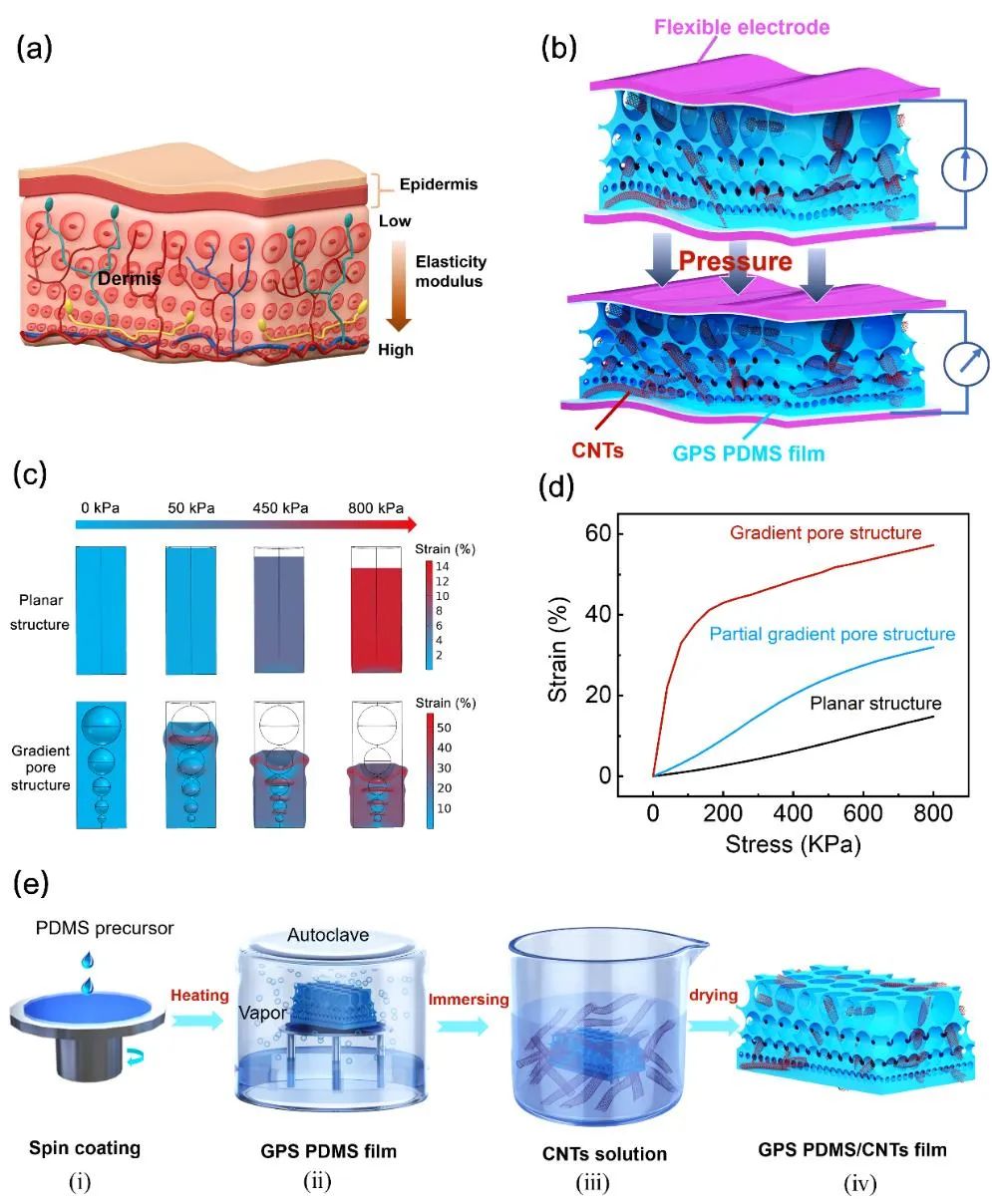
图1 梯度孔结构设计机理与传感机制
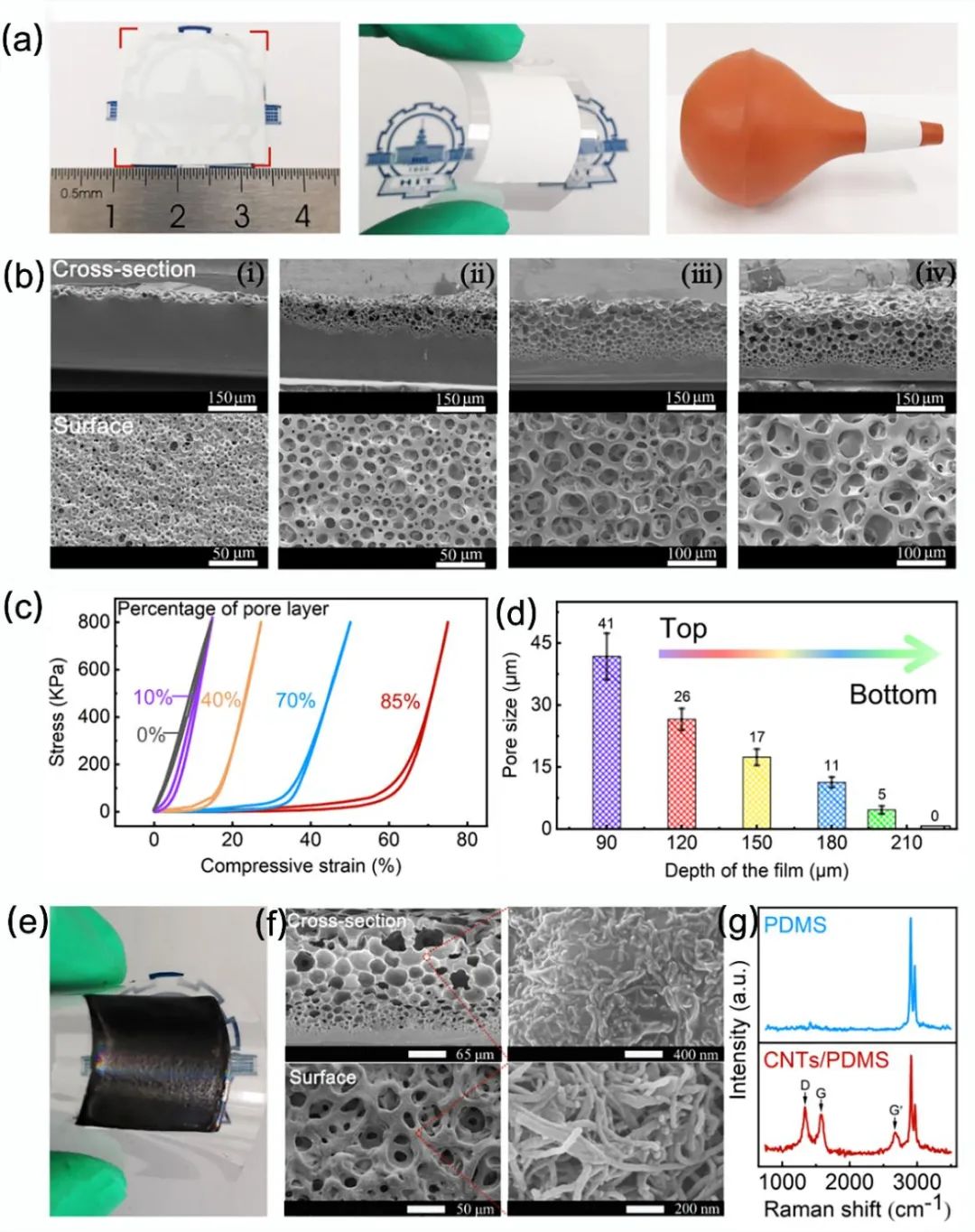
图2 梯度孔结构PDMS薄膜和PDMS/CNTs薄膜的制备与表征
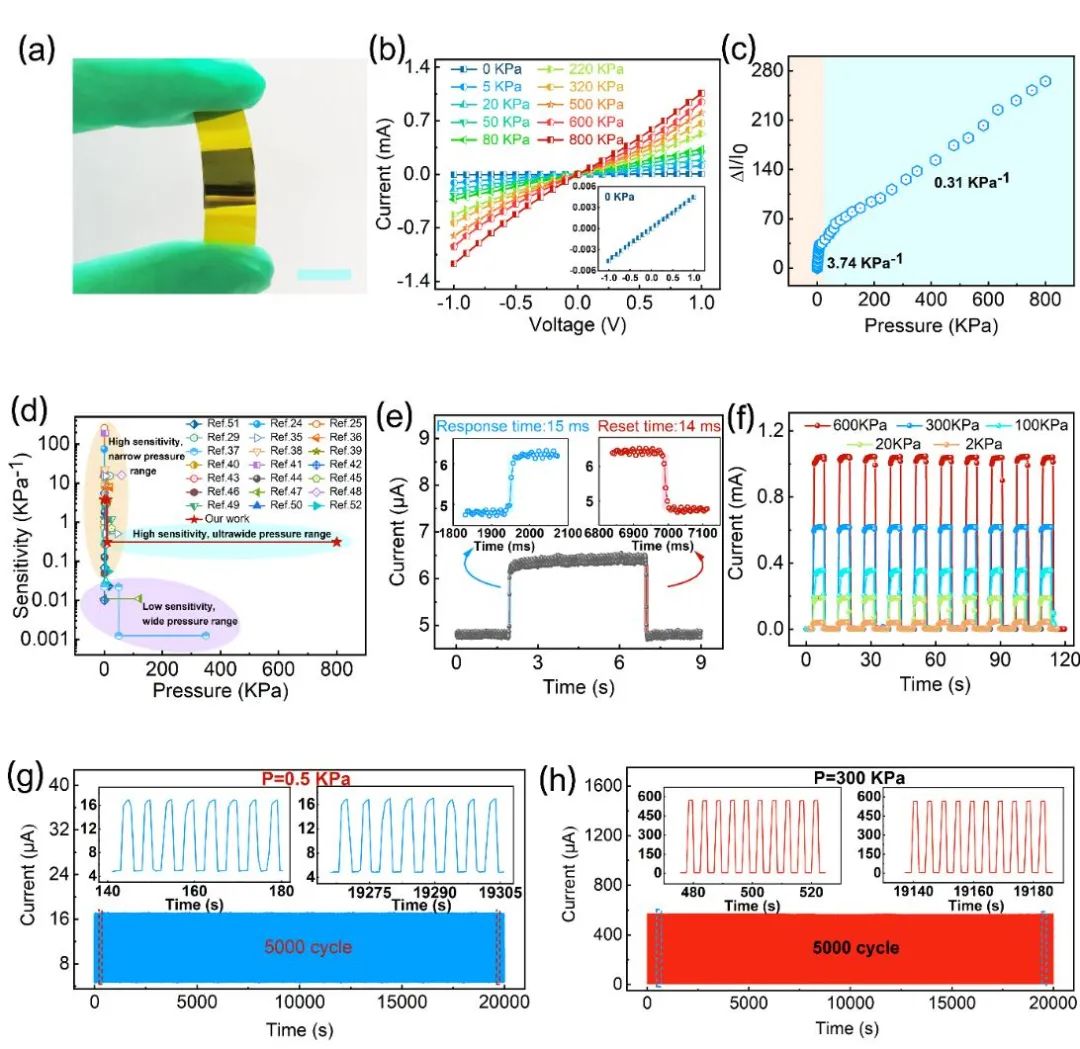
图3 基于梯度孔结构触觉传感器的压力传感性能
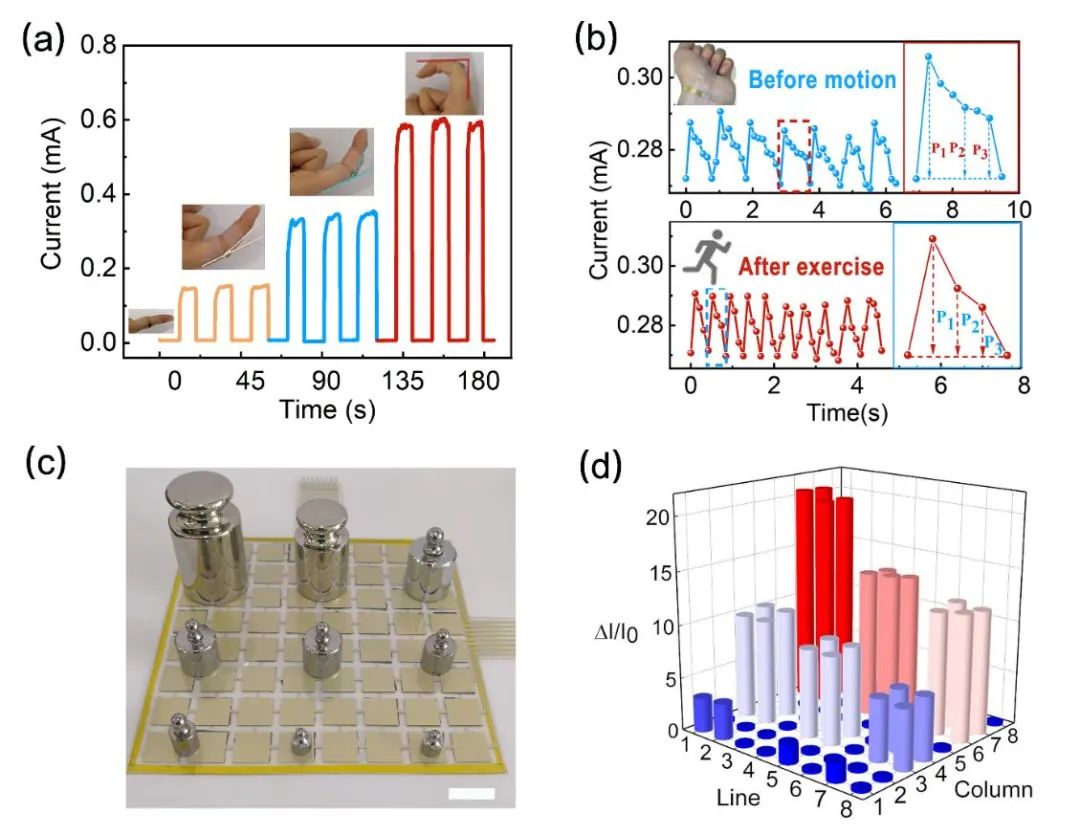
图4 基于梯度孔结构触觉传感器的概念性应用和空间分辨压力映射
这项工作得到了国家基础研究计划(2019YFB1310200)、国家自然科学基金(5212200580、61771156)、哈尔滨工业大学机器人与系统国家重点实验室自主计划课题(SKLRS201801B;SKLRS201607B)的支持。
以上文章转载于微信公众号化学与材料科学,如有侵权,请及时联系我们修改或进行删除。
