折纸机器人可以利用固有的变形特性实现功能性操作或运动,近些年来,一些可以无线操控的毫米级折纸机器人通过展示在狭小空间的运动和完成包括定向送药在内的医疗任务,被广泛的认为在医疗检测和治疗方面具有巨大的应用潜力。然而面对复杂的医疗环境,例如肠胃系统、泌尿系统等同时具有器官壁和体液的空间,至今没有机器人能展示两栖环境下的运动能力。同时除运动所需驱动器外,通常需要设计独立的功能单元来实现额外的医疗任务,这势必会增加机器人结构和控制系统的复杂程度。

针对上述问题,斯坦福大学赵芮可教授团队报道了一种可以同时实现水路两栖多模态运动、可控液体药物释放、固体药物运送的毫米机器人(视频1)。该机器人基于Kresling折纸结构,通过采用不同磁场特征分别实现了机器人的两栖运动和可控放药,打破了折纸机器人利用变形实现运动的传统和思维定式,提出将旋转磁场驱动与折纸结构几何特征结合实现陆地自适应翻滚和水下类螺旋桨推进;同时提出将固定磁场方向驱动与折纸结构变形特性结合的循环泵送原理,通过施加周期性的磁场实现药物的按需释放;机器人无需切换结构或控制策略即可实现两栖运动,具有极强的环境适应能力;同时在离体猪胃内进行了定向定量送药的实验验证,展示了其未来医疗应用的潜力。相关研究成果以“Spinning-enabled Wireless Amphibious Origami Millirobot”为题发表在《Nature Communications》上,并被包括Nature Research Highlights、NSF news在内的几十家国外媒体广泛报道。

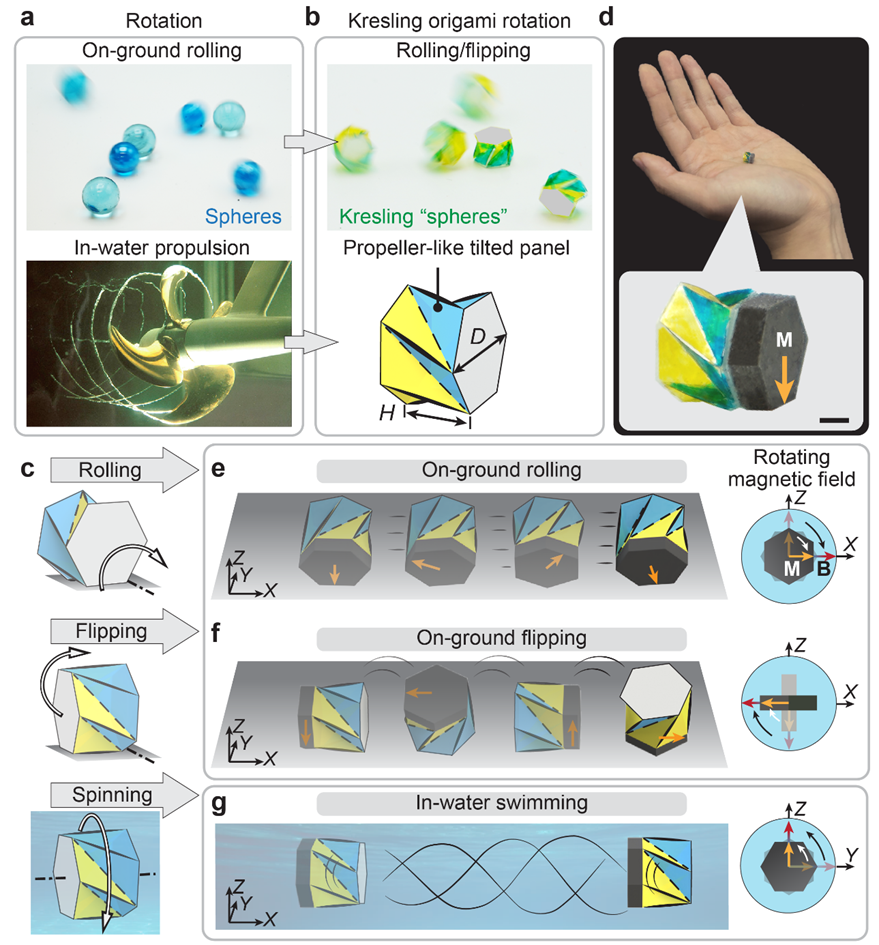
通过充分研究Kresling折纸的结构特征可以看出,该结构的外形具有两大特征(图1a和b),整体上Kresling折纸结构呈现类球形状,十分利于滚动和翻转运动(图1a),更有趣的是Kresling结构侧边具有类似螺旋桨叶片并沿圆周均匀分布的倾斜三角形面板(图1b),当机器人在水中高速旋转时可以产生沿结构轴向的推进力(视频2)。研究团队将磁驱动器附着在Kresling结构的一侧(图1d)用于驱动机器人实现想要的滚动、翻转和推进等不同运动模式(图1e-g),通过施加旋转磁场,机器人可以在不同环境下自适应的调整自己的运动模式,具有极强的环境适应能力,实现远程磁场操控下的“魔力转圈圈”。
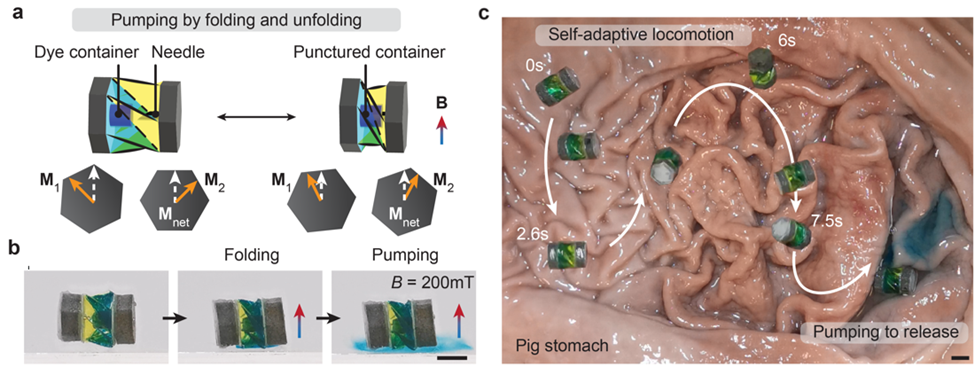
在团队之前的研究中,Kresling折纸结构的耦合位移-收缩特性被用于仿生机械臂的伸缩和类蠕虫机器人的爬行。在最新的研究工作中,该变形特性被赋予了新的使命,研究团队提出了泵送原理(图2a)用于医疗上的可控放药功能,当施加固定方向的周期性磁场时,机器人内部设计的放药结构将被循环触发,实现按需按量的释放药物,在“魔力转圈圈”的帮助下,机器人分别实现离体猪胃内(视频1和图2c)和液体环境下(视频3)的定向送药。
除去特殊的外形特性外,Kresling还具有薄壳结构,通过引入侧面的切痕和前端的开孔,机器人在转圈圈时会在腔体内产生一个负压区域(图3),该原理不但可以在机器人游泳运动时减小运动阻力,还被创造性的用于物体的吸取(视频4),进一步提高了机器人的多功能性。
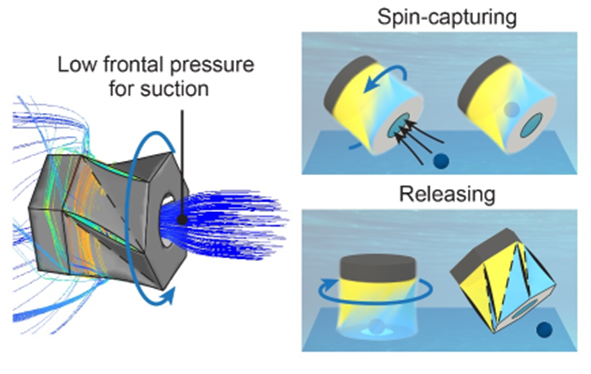
图3:基于魔力转圈圈的负压吮吸原理
团队提出的两栖毫米机器人结构简单,无需任何额外功能单元设计,所有功能均通过磁场控制实现,机器人系统具有多功能并高度集成,未来可作为微型医疗设备实现精准治疗或诊断。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
