触觉感知是指通过人体皮肤直接获取接触/非接触信息的能力,其实现主要依赖于皮肤内外独特而完善的生物结构。研究发现,皮肤内部的表皮、真皮和皮下组织都是由一系列交错排列的“互锁”结构的微脊组成,有助于集中和放大局部应力,从而使迈斯纳小体能够快速获取外部刺激信息。柔性电子的快速发展为通过模仿人体皮肤的一些结构特征来实现某些触觉感知功能提供了可能,催生了对电子皮肤(e-skin)的研究。目前的大部分研究工作都是通过模仿皮肤的局部结构来实现电子皮肤的构建,从而实现仅对单一刺激的触觉感知。然而,利用由表皮-真皮-皮下组织组成的全皮肤仿生(FSB)结构结合毳毛状结构(VHS)的电子皮肤的开发和突破几乎没有被探索。
鉴于此,济南大学李阳教授团队联合北京理工大学沈国震研究员团队共同提出了由人工智能(AI)驱动的全皮肤仿生(FSB)电子皮肤,该电子皮肤由人类毳毛、表皮-真皮-皮下组织的结构组成。受益于双互锁层状微锥结构和超电容离子电子效应,FSB电子皮肤具有8053.1 kPa−1 (<1 kPa) 的超高灵敏度,3103.5 kPa−1 (1-34 kPa) 的线性灵敏度、快速响应的恢复时间(<5.6 ms)和低检测极限(0.05 Pa)。为了证明该电子皮肤具有从触觉感知到先进智能触觉认知的能力,设计了以下应用:(1)基于毳毛仿生学的摩擦电效应实现了静态/动态非接触式触觉感知;(2)基于超级电容离子电子效应的表皮-真皮-皮下结构仿生学和五层多层感知(MLP)实现了手势认知和机器人交互的一般智能触觉认知;(3)在人工神经网络和信号采集和处理电路的帮助下,开发了一种先进的智能材料认知系统,能够单接触识别材料种类并实时显示结果,平均准确率达到98.34%。相关工作以“Perception-to-Cognition Tactile Sensing Based on Artificial-Intelligence-Motivated Human Full-Skin Bionic Electronic Skin”为题发表在国际顶级期刊《Advanced Materials》上。
FSB电子皮肤的构建与压电电容特性FSB电子皮肤具有三层结构配置:双面异质顶层用于模仿人类毳毛和表皮;基于双面层状微锥结构(LMS)离子凝胶的中间层用于模拟皮肤真皮;底层单面LMS用于模拟皮下组织。组装后的电子皮肤的横截面SEM图像显示了与皮肤结构(表皮-真皮-皮下组织)相对应的仿生双互锁结构(图1)。FSB电子皮肤设计可以看作是两个垂直堆叠的电子皮肤,包括一个VHS摩擦电电子皮肤和一个超级电容离子电子皮肤。所提出的双互锁LMS超级电容离子电子皮肤在压力低于1 kPa时表现出8053.1 kPa-1的超高灵敏度,并且线性响应对应于在1-34 kPa压力范围内高达3103.5 kPa-1的灵敏度(图2)。将1 kPa的压力轻轻地施加在双互锁LMS超级电容离子电子皮肤上,然后快速释放,显示小于5.6 ms的响应/恢复时间,这比人类皮肤(30-50 ms)和其他三种类型的电子皮肤快得多。此外,双互锁LMS超级电容离子电子皮肤还具有0.05 Pa的检测限。
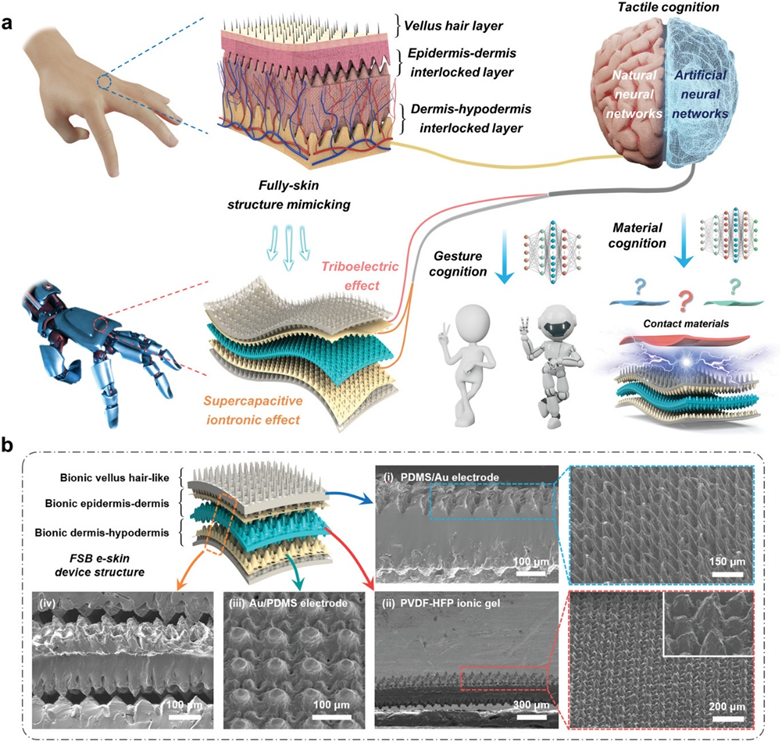
图1基于FSB电子皮肤的感知到认知触觉感知构建图
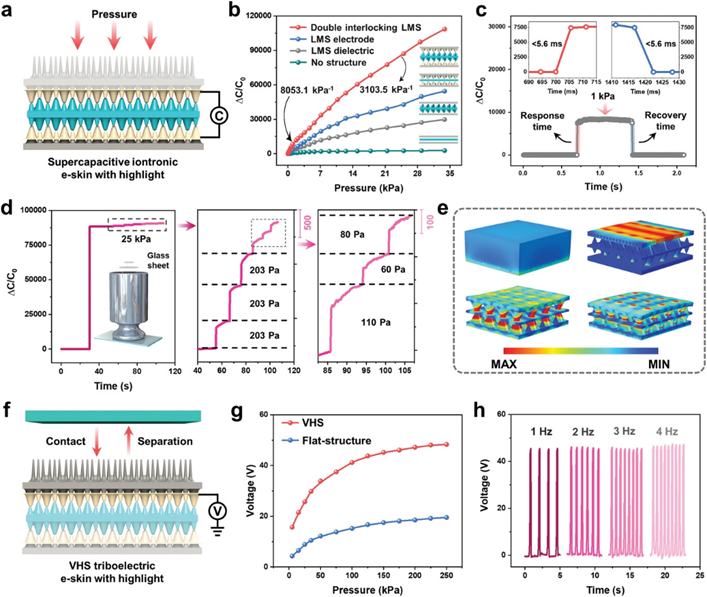
图2电子皮肤部件的性能表征
静态和动态非接触感知
作者制备了由16个FSB电子皮肤单元组成的柔性非接触感知阵列(4×4矩阵),每个单元都可以检测和定位人手指的静态非接触刺激,并用唯一的数字标记。当手指在不同的轨迹(“U”、“J”和“N”)上滑动而不接触阵列时,每个单元都可以显示瞬时电压信号,并且字母“U”、“J”和“N”可以根据感知阵列中16个通道的电压信号来显示(图3)。为了展示系统的实时认知能力,选自12种手势形态(初始状态,“A”、“B”、“C”、“D”、“E”、“F”、“I”、“L”、“O”、“V”和“Y”)。随着志愿者的手势从初始状态到代表字母“E”的状态,相应的响应波形和匹配的手势形态照片同时显示。基于实时手语实验的结果表明,FSB e-skin可以看作是实现签名者和非签名者之间正常交流的初步示范,从而为中国的无障碍交流开辟了一条新途径。
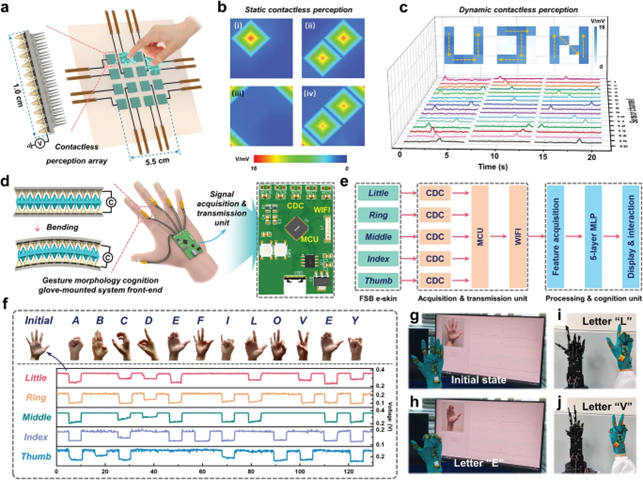
图3非接触式感知和手势认知演示先进的智能材料认知系统
作者将在此展示FSB电子皮肤用于开发先进的智能材料认知系统,以识别材料种类。依次安装了12种不同的材料,包括铜、PU、气流成网纸、棉、纸、丁腈等。由于12种材料在相同压力下产生独特的电压信号,只要施加的压力由电容信号确定,就可以通过不同的电压幅度、持续时间和极性来推断材料种类。结果表明,12种材料中有8种达到了超过99%的分类准确率,而其余4种材料的准确率也达到了85%,平均准确率可以达到98.34%(图4)。为了扩展材料认知能力,设计了一个由12个FSB e-skins组成的柔性材料认知阵列(3×4矩阵),通过一次接触实现不同位置的材料同时认知。毫无疑问,所提出的先进智能材料认知系统有望为柔性机器人和智能假肢提供新的触觉认知能力,并将促进人工智能的发展。

图4先进智能材料认知系统演示
小结:作者提出了一种基于仿生毳毛和表皮-真皮-皮下双互锁微锥结构的堆叠配置的高性能FSB电子皮肤,并展示了其从触觉感知到先进的应用前景。电子皮肤具有对微小压力的高灵敏度、宽压力范围内的良好线性、快速响应/恢复速度、低检测限和出色的长期耐用性。FSB电子皮肤构建的智能柔性感知阵列,实现了静态和动态非接触刺激的触觉感知。超级电容离子电子效应的手套式认知系统可用于手语认知和机器人交互。重要的是,开发了一种先进的智能材料认知系统,能够单接触识别材料种类并实时显示结果。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
