自然界中许多生物表面具有特殊润湿性,是设计功能界面的广泛灵感来源。如通过仿生蝴蝶翅膀,可加工出具有液滴单向滚动特性的超疏水表面;仿生水稻叶可制备具有两向异性滚动的超疏水表面;仿生猪笼草则可获得具有超滑特性的液体注入表面。目前,基于仿生技术,研究人员已实现了多种双向异性特殊润湿性表面的加工和液滴运动的操控。然而,设计并加工具有多向异性的特殊润湿性表面,并实现液滴的稳定、多方向可控运输,仍具有很大的挑战性。
通过仿生蝴蝶翅膀、水稻叶和猪笼草的特殊润湿性,天津大学机械工程学院陈发泽团队联合南开大学曹墨源和长春理工大学廉中旭,报道了一种具有三向异性润湿性的超滑表面并将其用于液滴的可控运输,相关成果Programmable droplet transport on multi-bioinspired slippery surface with tridirectionally anisotropic wettability发表于《Chemical Engineering Journal》,论文第一作者为天津大学机械工程学院硕士研究生蔡泽鑫。
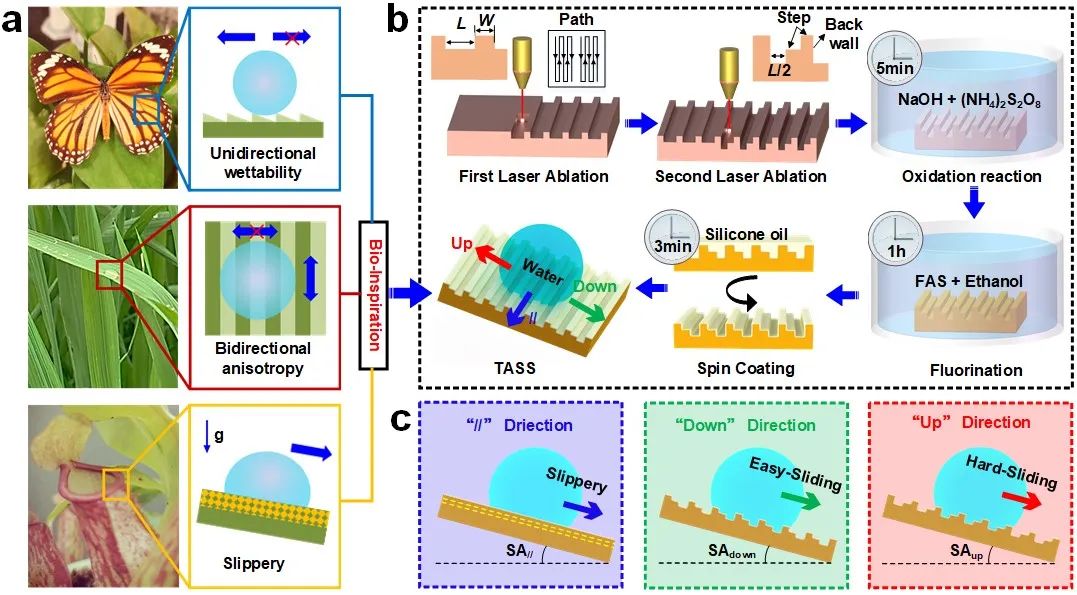
图1:三向异性超滑表面的加工流程。
研究人员首先通过飞秒激光直写技术在铜基底表面加工了宽度、深度可控的周期性阶梯状微槽阵列,通过化学氧化在表面构建出纳米结构,再经超疏水化处理和硅油注入后获得了具有液滴三向异性滑动特性的超滑表面(图1)。
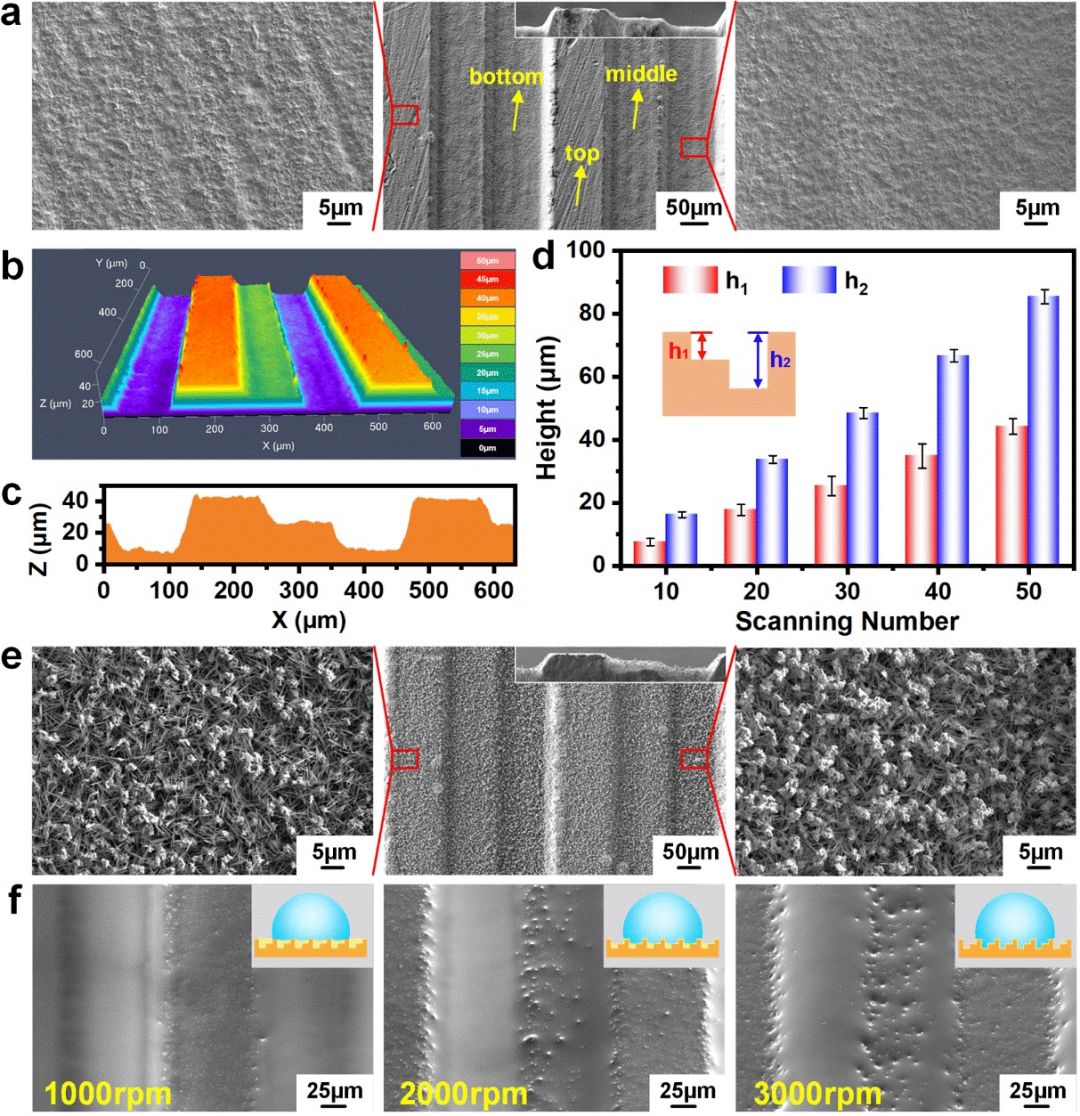
图2:不同加工阶段的试样表面形貌。
不同加工阶段的试样表面形貌表明,飞秒激光能够精确控制阶梯状微槽结构的形状和尺寸,化学氧化生成的针状和颗粒状形成了丰富的多孔纳米结构,并将旋涂注入的硅油固定在样品表面(图2)。
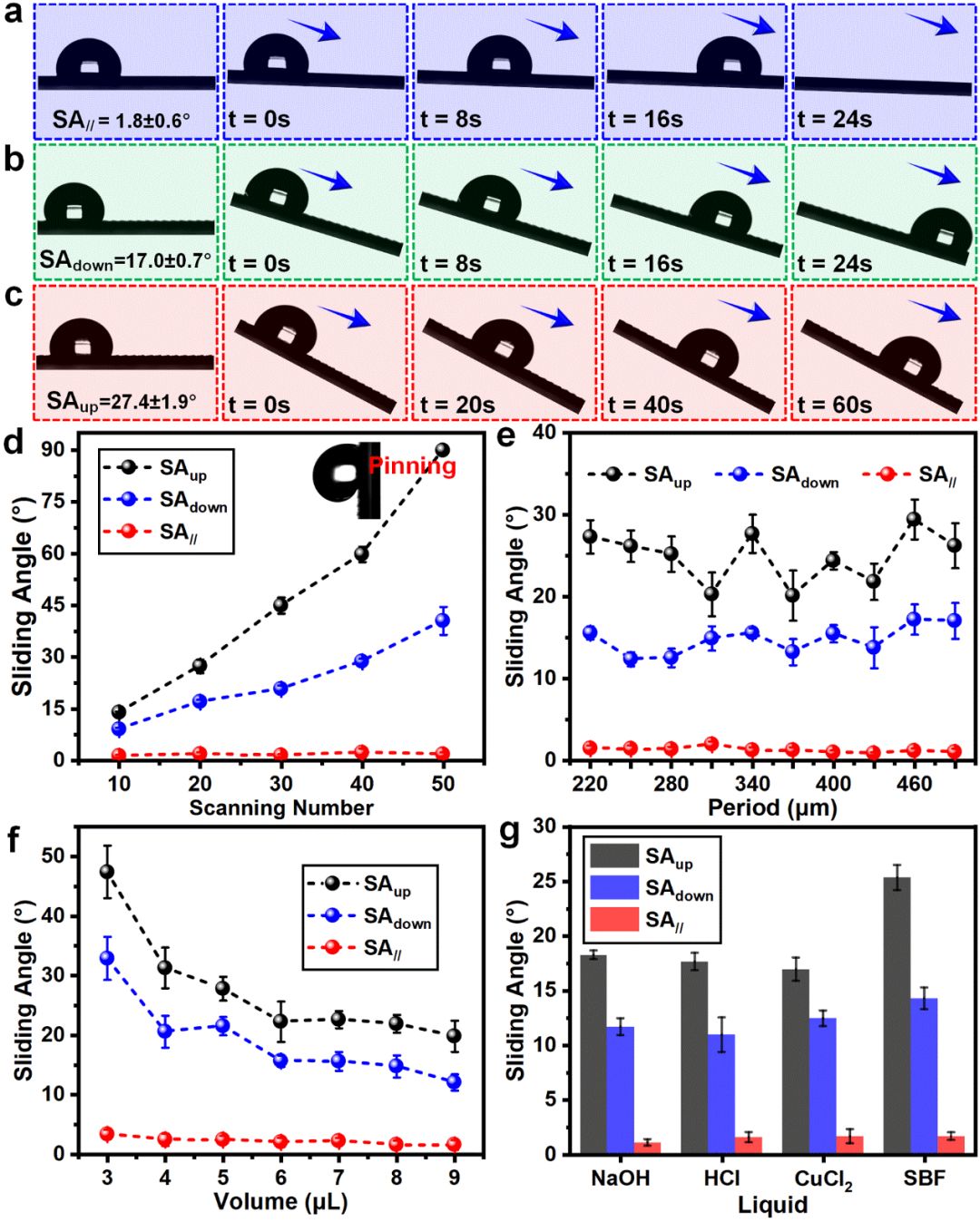
图3:液滴在试样表面的各向异性滑动。
通过测量液滴在样品表面的滑动角,研究人员发现在平行于微槽方向(“//”方向)液滴能轻易滑落;在垂直于沟槽的方向上,液滴更容易沿着下台阶方向(“down”方向)滑落,而沿其相反方向(“up”方向)则较难滑动。因此,液滴在该表面表现出三向异性滑动特性(图3)。
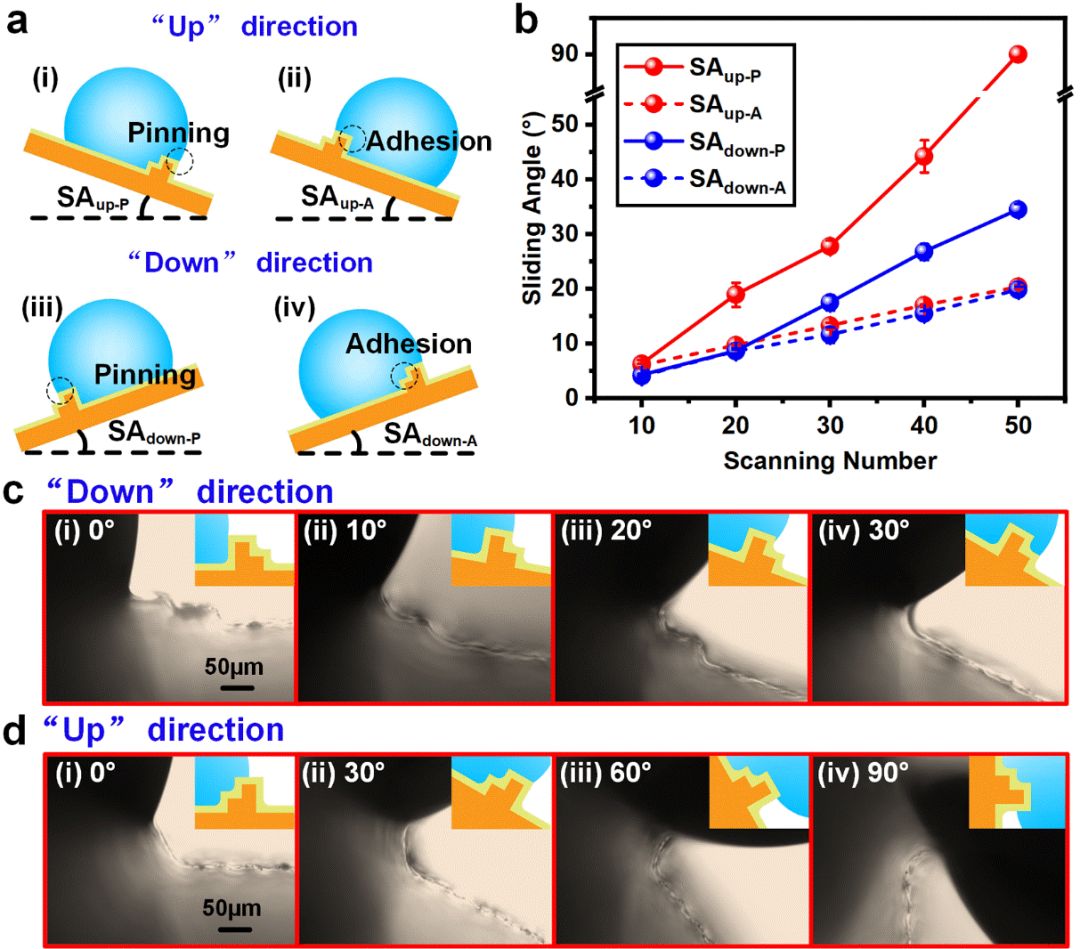
图4:液滴在单个台阶结构上的四种滑动阻力。
为了探究三向异性滑动的形成机制,研究人员设计了仅含单个台阶结构的超滑表面。液滴在单个台阶结构上运动时受到四种滑动阻力:“up”方向和“down”方向的钉扎力和粘附力。通过滑动角大小对比发现,液滴在“up”方向上因台阶顶部边界对液滴接触线的钉扎产生的钉扎力最大,是产生三向异性滑动的根本原因(图4)。
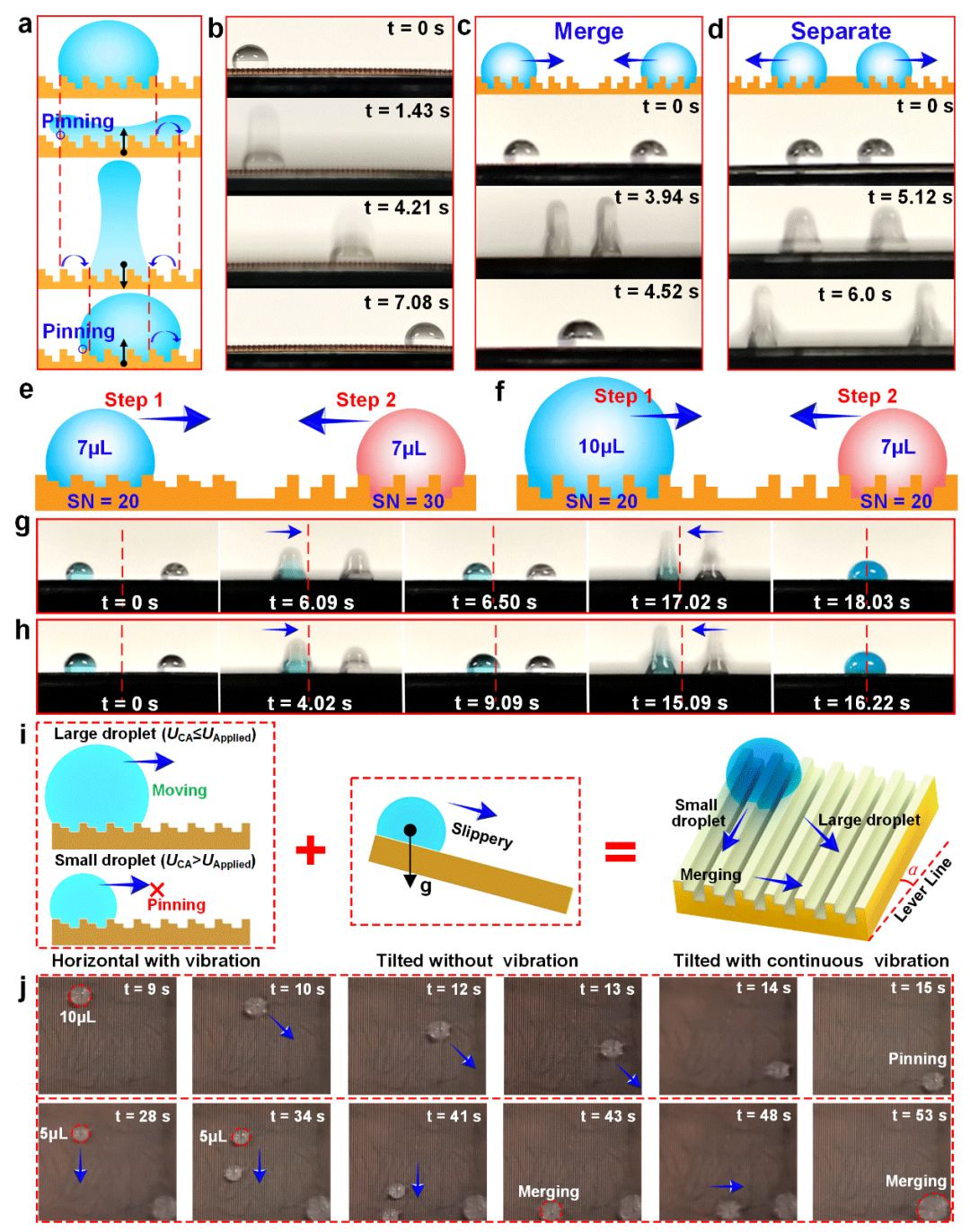
图5:振动辅助的可控液滴运输。
三向异性超滑表面可用于液滴的可控运输(图5)。通过垂直振动的激励能实现液滴在水平表面上的定向运输、合并和分散。触发液滴运动所需的振动幅值与微台阶尺寸参数和液滴体积有关,基于此,研究人员设计了两种通过操控液滴运动顺序来控制化学反应的微反应器。此外,将样品沿微槽方向倾斜放置并施加机械振动,发现大体积液滴(10微升)可跨槽沿斜线滑动,而小体积液滴(5微升)则沿着槽滑动,在样品下沿合并为大液滴后则可跨槽滑动。
本项工作旨在通过仿生技术,设计一种可用于液滴多方向可控运输的功能表面,有望应用于微流控、化学微反应器、液体运输等领域。
论文工作得到了博士后创新人才支持计划(BX20190233)、国家自然科学基金(5210050794、22075202)和长春理工大学跨尺度微纳制造教育部重点实验室2021年度开放基金(CMNM-KF202102)的资助。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
