研究背景
生物皮肤可以检测到广泛的机械和热刺激,以触发保护性反射,类似的基于触觉反馈的功能正在被机器人、假肢和交互系统所寻求。电子皮肤(e-skins)在最近几年吸引了大量的关注,主要关注于分布式压力或力传感器。然而,感知其他刺激的能力,如温度,也同样重要。它有助于保持恒定的体温和对疼痛的热或冷物体的反应。当暴露在恶性热(极热[>52°C]或极冷[<5 °C])刺激下时,疼痛感是由感觉神经元的激活建立的。空间分布的温度感受器、痛觉感受器和皮肤中的神经末梢感知并将这一关键信息传递给大脑,供其感知和采取适当行动。这些感受器的功能激发了机器人和人工肢体与疼痛相关的反射的发展,并推动了迄今为止专注于模仿压力或力反馈的机械感受器的领域。尽管阐明有害刺激(机械和热)相关反射机制的研究已经报道了20多年(2021 年的诺贝尔医学奖也是为此而颁发的),但与疼痛相关的反射还没有引起机器人学家的注意。模仿生物热觉通路的形态和处理能力的人造皮肤至今还没有被探索,在这个领域只有少数报告是由于:
1) 精确的热感应机制的神经通路仍然难以捉摸,2) 缺乏热敏和坚固的软材料,以及3)与大面积柔性基底上的软材料加工有关的技术挑战。为了模仿热感应神经通路,电子皮肤还必须以低延迟有效地处理大量的感应数据,这样才能达到更快的反射,防止对人类或假肢/机器人设备的潜在损害。目前,感知经验的数据处理是使用独立适应和学习的软件程序进行的。然而,这是一种低效的方法, 因为大量数据的编码、处理和传输会影响延迟。带有片上外围神经系统的主动感知,如硬件层面的本地化学习,可以缓解此类问题。
研究成果近年来,拥有类似皮肤形态和功能的电子系统(电子皮肤[e-skins])已经引起了相当大的关注,在机器人、假肢和互动系统等不断发展的领域提供感觉或触觉反馈。然而,到目前为止,主要的焦点是分布式压力或力传感器。在此, 英国格拉斯哥大学Ravinder Dahiya教授团队提出了一种具有生物系统功能的热感知电子皮肤。电子皮肤中柔软的、分布式的、高度敏感的微型(≈700 μm2)人工温度感受器(ATRs)是使用一种创新的制造途径开发的,包括在确定的位置进行定向五氧化二钒纳米线的电泳组装和高分辨率的电动流体力学印刷。受皮肤形态的启发,ATRs被嵌入到热绝缘的软纳米二氧化硅/环氧树脂聚合物层中,但它们表现出卓越的热灵敏度(-1.1 士0.3% °C-1)、快速响应(≈1 s)、特殊的稳定性(>5 h的操作中可忽略的滞后)和机械耐久性(高达10000次的弯曲和扭曲负载周期)。最后,开发的电子皮肤被集成在机器人手的指尖上,通过硬件层面的局部学习,展示了类似生物系统的反射对温度刺激的反应。相关研究以“Skin-Inspired Thermoreceptors-Based Electronic Skin for Biomimicking Thermal Pain Reflexes”为题发表在Advanced Science期刊上。
研究亮点
1. 报告了一个基于人工温度感受器(ATR)的电子皮肤系统,以模仿生物系统,如对广泛的温度刺激(5-360°C)的感应和反射动作(兴奋和抑制)。
2. 采用了新的印刷电子路线来开发电子皮肤,它模仿了生物热感应系统的结构和功能。3. 采用了DEP技术在大面积上对热敏感的V2O5纳米进行确定性的、位置和方向控制的组装。
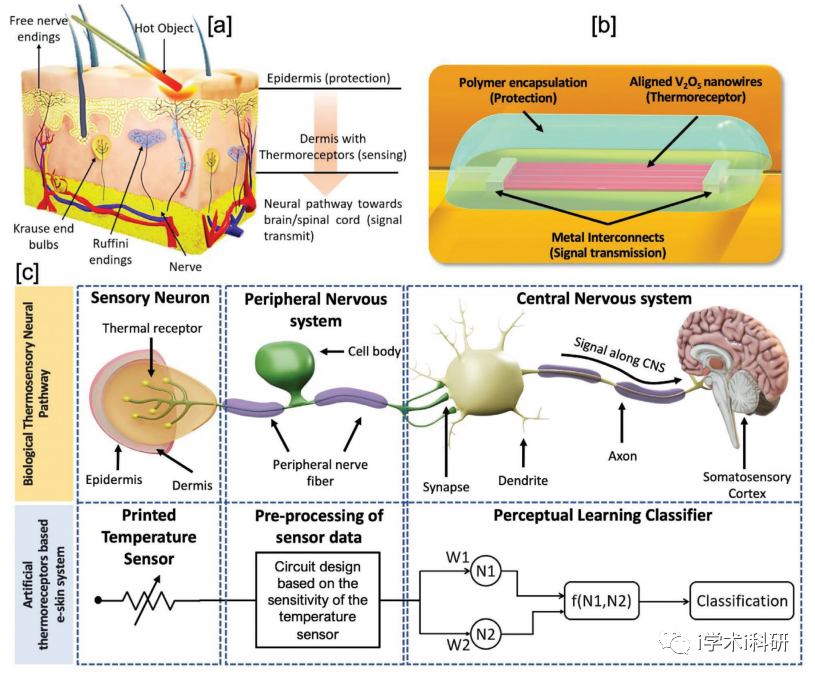
Figure 1. The biological and artificial thermal sensory neural pathway.
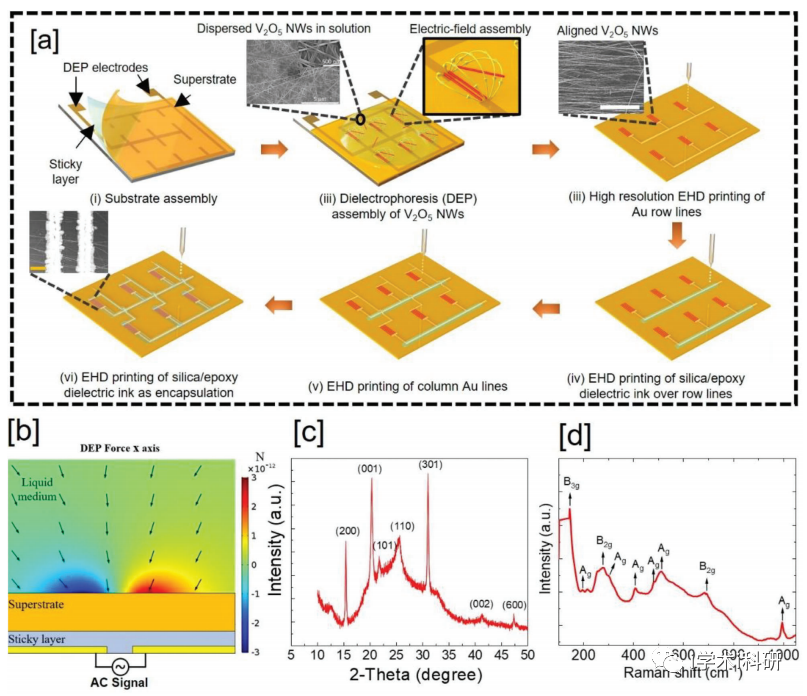
Figure 2. a) Schematics/SEM images illustrating the fabrication of artificial thermoreceptors using DEP aligned V2O5 NWs. b) Simulated DEP force according to the x-axis cross sectioning the DEP electrodes. The DEP force is shown in red and blue color and electric field gradient plot is shown by arrows. c) The XRD 2-theta scan, and d) Raman spectra for the V2O5 NWs.
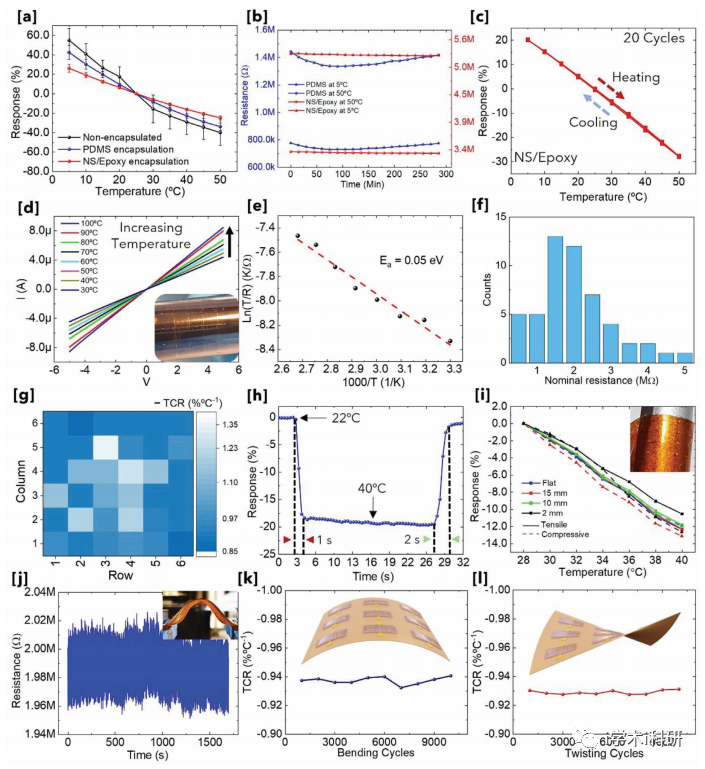
Figure 3. Electrical, sensing, and electromechanical performance of ATRs.
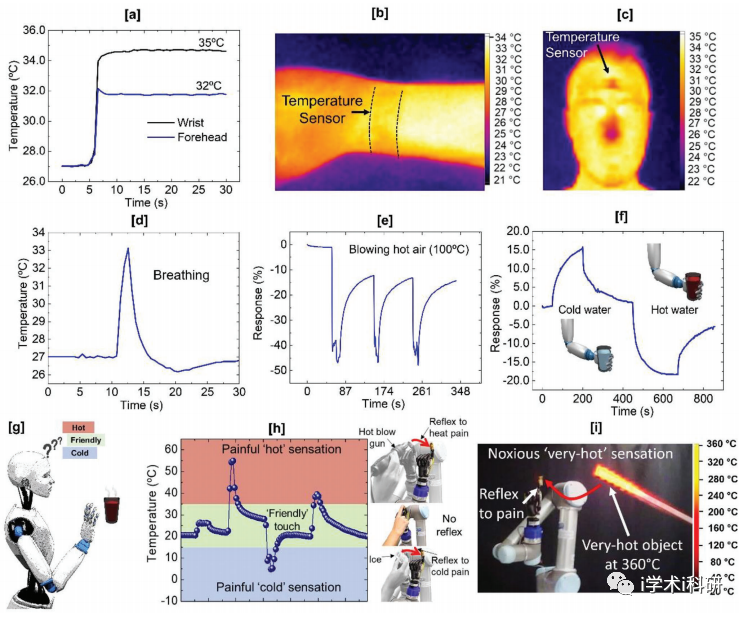
Figure 4. The demonstration of the artificial thermal sensing neural pathway capable of “in-skin” learning.
总结与展望
作者报告了一种新颖的电子皮肤热感应系统,使机器人能够在大范围内感受、学习和应对外部热刺激。采用了新的印刷电子路线来开发电子皮肤,它模仿了生物热感应系统的结构和功能。为此,采用了DEP技术在大面积上对热敏感的V2O5纳米进行确定性的、位置和方向控制的组装。此外,EHD印刷的分辨率远在几微米以内,用于印刷金属电极、互连、探测垫和电介质(作为封装剂)的图案。纳米二氧化硅/环氧树脂(NS/epoxy) 印刷的电介质被选择来封装传感通道和电极/互连,与人类的温 度感受器相类似。由此产生的小型化、分布式和嵌入式传感器显示出稳定、稳健的热感应特性,这是模仿生物体温调节系统所需要的。最后,通过将电子皮肤集成到机器人手的指尖上,并在硬件层面使用本地化学习,提出了动态的兴奋和抑制反应,代表了三个不同温度等级的外部温度刺激的大小和速率变化。所开发的系统显示了对人体触摸的抑制性反射和对痛苦的冷热和非常痛苦的热感觉的兴奋性反射。与之前展示的柔性温度传感器相比,该工作完全模仿了神经学原理,从而显示了直接在硬件层面上进行本地化学习的能力。这种通过硬件进行的分布式学习对下一代机器人和互动系统具有很大的潜力,因为它们需要减少中央控制单元的认知负荷。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
