由于人体内环境的复杂性,如何精准地将药物靶向递送到指定病患位置是药物递送领域的公认难题。具有强大可操控性的微型机器人有望成为该问题的革命性解决方案。然而,目前已有的微型机器人系统存在以下问题:1)由于微型机器人的驱动模块占据了较大体积,使得载药的空间有限。2)现有微型机器人采用的载药方法一般为表面涂层或共混,这可能导致药物在运输中暴露在体内环境中从而失活或泄露。3)大部分微型机器人的可控释药是基于对药物本身进行修饰,从而限制了所载药物的选择,此外控制释药的外界刺激(如光)可能也会影响药物的性能。
鉴于此,伦敦帝国理工学院Molly Stevens课题组报道了一种受马勃菌启发的新型微型机器人系统,该系统具有巨大的载药空间、有效的药物保护、近红外可控的按需释药以及精准磁控靶向的能力,有望解决目前微型机器人药物释放的挑战。论文的第一作者为博士研究生宋昕和博士后研究员孙汝杰博士,成果发表在Advanced Materials上。
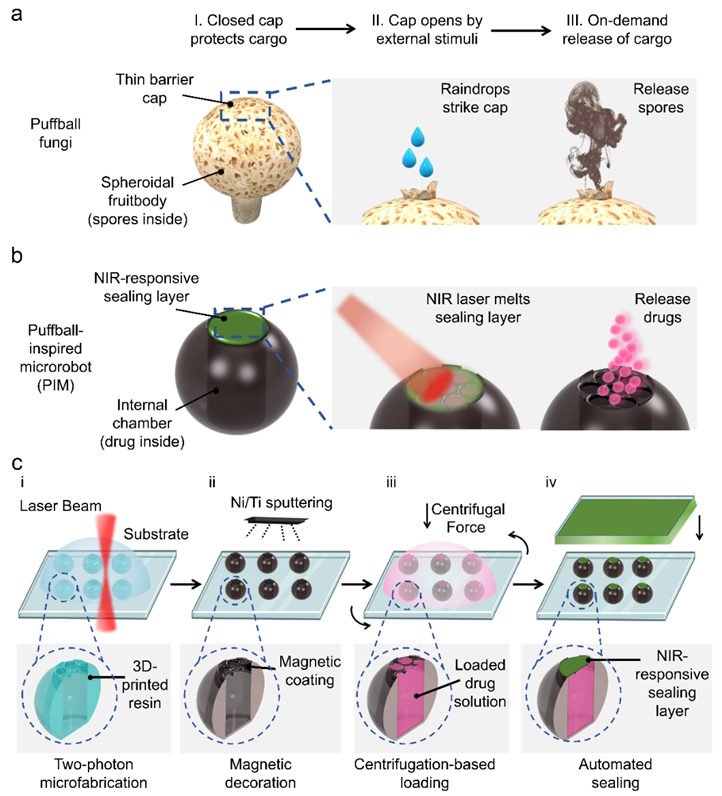
整体设计自然界中的马勃菌有许多特点:1)马勃菌的孢子产生并储存在球形子实体内,巨大的载荷空间足以容纳数万亿个孢子。2)马勃菌顶部存在一个薄且灵活的密封盖子,从而将内部储存的孢子与外界环境隔绝并保护它们直到成熟。3)当马勃菌受到外部刺激,例如雨滴或阵风,顶部的盖子会打开并释放内部的孢子云。这些特点对于解决微型机器人系统目前存在的挑战有非常重要的借鉴意义。基于此,研究人员开发了一种新型磁控微型机器人,其内部有足够的空间可用于载药,同时顶端设计为近红外响应的密封层,并且球形形状可以在旋转磁场下可控地滚动前进。类似于马勃菌的特点,该结构在药物运输的过程中将药物与外界环境有效隔绝开从而实现有效的保护,到达靶向的目的地后,密封层可被近红外融化并释放内部的药物。
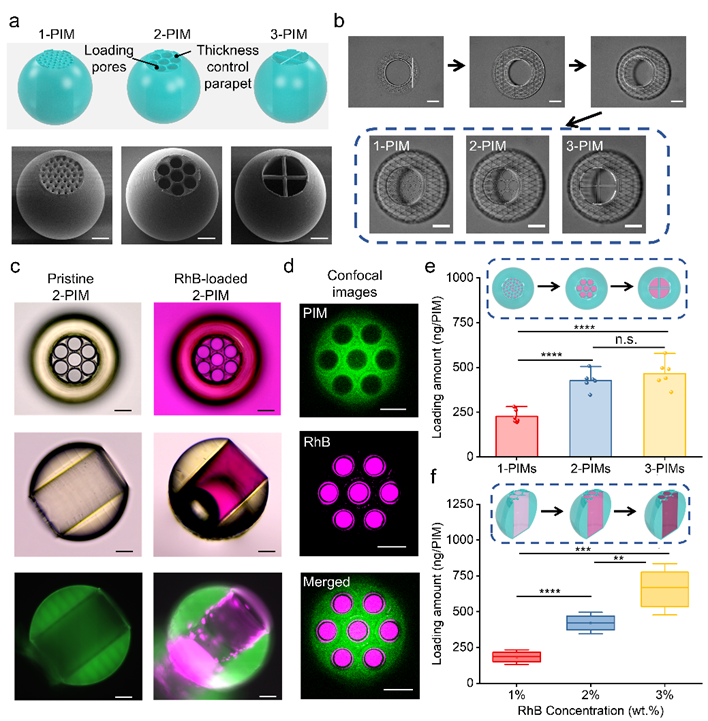
图1. 整体设计
文章要点:
1)通过双光子微纳3D打印高精度地制备了磁控微型机器人,并设计了三种具有不同孔径的微型机器人顶盖以研究其药物装载和密封性能。通过离心装载的方法将药物模型罗丹明B成功装载入微型机器人的内部空间中,并可以通过药物浓度、顶盖孔径、装载循环次数等调控药物装载量。
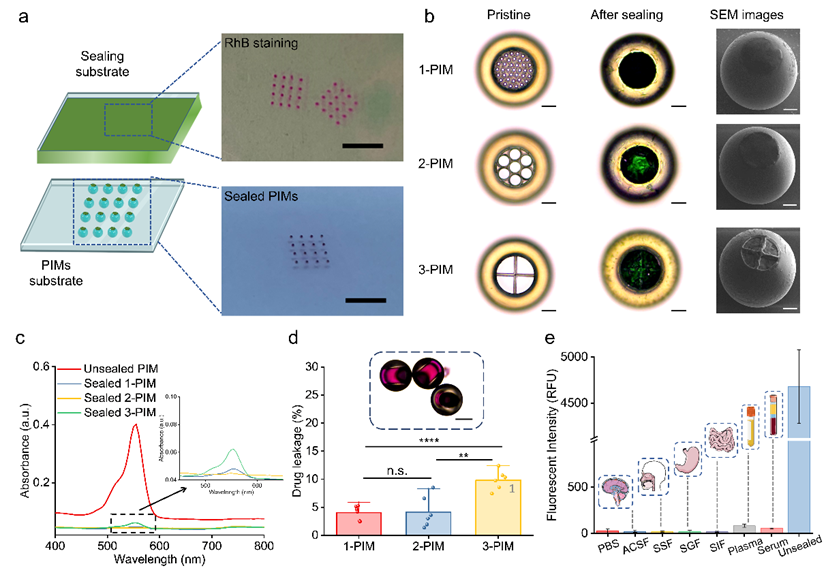
图2. 制备与药物装载
2)选择聚己内酯二醇与近红外响应染料IR-780为密封材料,通过浸没密封的方法制备了类似马勃菌盖子的近红外响应密封层,从而实现了对微型机器人的有效封装,装载的药物在多种生理环境下的泄露率都远低于报道的其它微型机器人。
图3. 微型机器人的密封
3)微型机器人的密封层具有优秀的近红外光热性能,因此也是控制药物释放的开关。在到达指定的位置后,可以通过近红外来触发密封层的融化,从而靶向精准释放内部装载的药物。
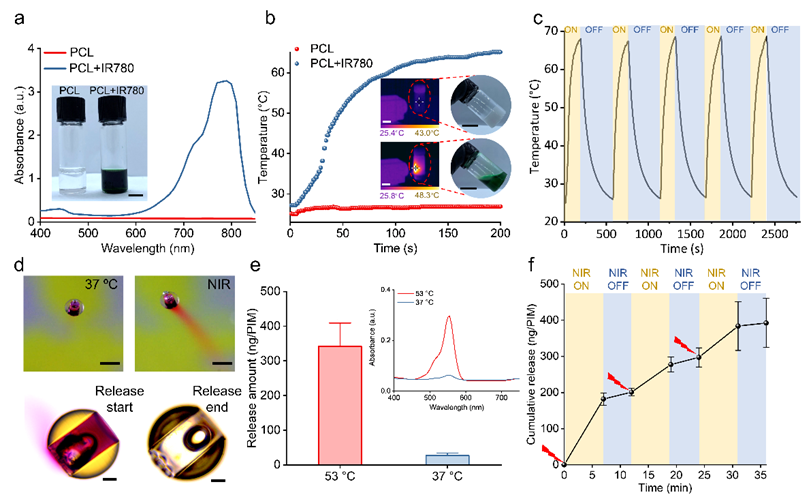
图4. 微型机器人的药物释放
4)微型机器人具有强大的磁操控能力,通过调节旋转磁场的参数具有三种不同的运动模式,并且可达到1616.88 µm/s的移动速度。在多种环境,例如细胞黏附的表面或者猪胃中均可实现优秀的可控运动。在错综复杂的仿血管环境中,可以实现精准定位以及靶向释药。
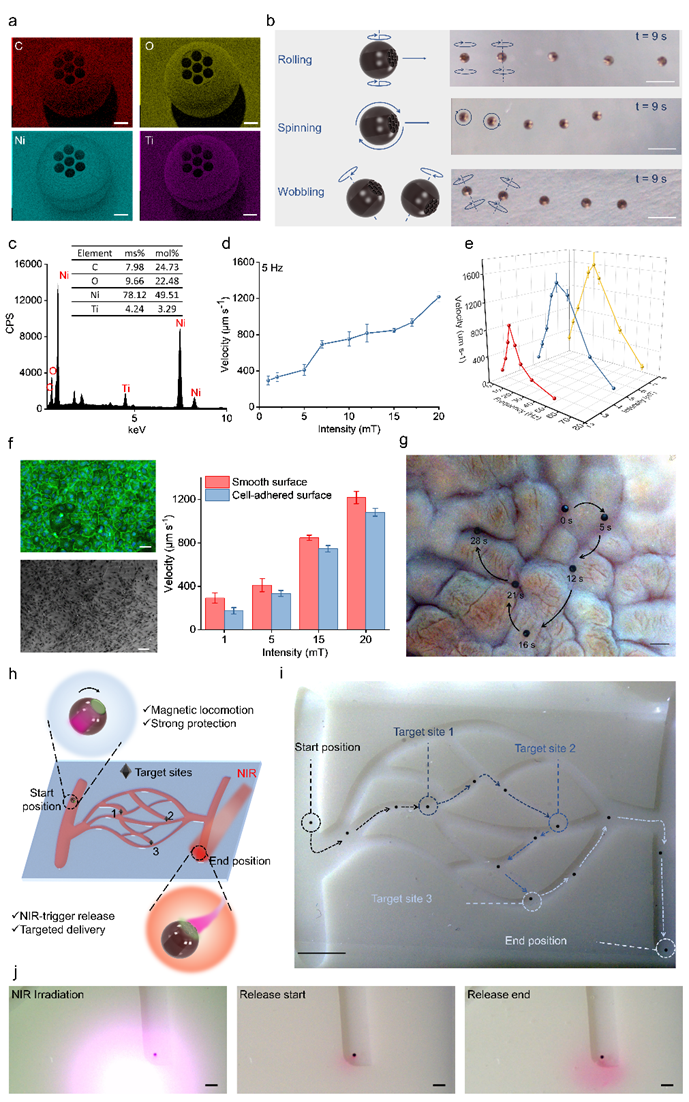
图5. 微型机器人的磁性操控
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
