液滴操纵技术在生物医疗、能源、化学、材料等领域具有重要的应用价值。然而,目前对液滴操纵的研究主要集中在实验现象观测与分析层面,缺乏对基本原理的深入探索,并且对实现液滴操纵的基本条件认识存在不足。同时,人造仿生材料存在工艺复杂、成本高昂,以及运动距离相对较短、运动速度相对较小等诸多缺点,限制了液滴操纵材料的应用范围。另外,虽然广大学者在液滴操纵研究方面已经取得了较多成果,但这些研究仅局限在实验室阶段,如何将其广泛应用于实际生活仍有待进一步研究。
近期,长春理工大学跨尺度微纳制造教育部重点实验室的许金凯教授、修思羽硕士生、廉中旭博士与吉林大学机械与航空航天工程学院于化东教授在《Droplet》期刊上共同发表《仿生液滴操纵材料:原理、方法和应用》(Bioinspired materials for droplet manipulation: Principles, methods and applications)综述文章,系统地分析了固体表面液滴定向运动的基本原理,总结了液滴操纵基于主动和被动策略的最新研究进展及应用方向,并展望了仿生液滴操纵材料在未来发展中所面对的机遇与挑战。
该综述在介绍固体表面润湿理论的基础上,根据液滴驱动的原理不同,将液滴操纵机制分为被动(拉普拉斯压力和润湿性梯度)和主动(电场、磁场、光场和热场)两种类型,如图1。在总结液滴操纵的典型研究实例中,基于被动策略的各向异性表面主要分为三种类型:几何各向异性表面、润湿各向异性表面和协同各向异性表面,如图2;在主动操纵液滴策略介绍中,分析了利用电、磁和光等不同外场操纵液滴的方法及优缺点,如图3。另外,文章介绍了液滴操纵技术在生物医学、化学、材料、能源工程等领域的典型应用,如图4。最后,文章对仿生液滴操纵材料的发展提出几点挑战:(1)基于被动策略的液滴移动速度和移动距离受限;(2)基于主动策略的多液滴同时可编程操纵研究很少;(3)外场操纵方法在具体应用中有其自身的局限性;(4)液滴操纵材料制备工艺复杂、成本高、长期稳定性差等问题;(5)液滴操纵系统的微型化、集成化亟待解决。
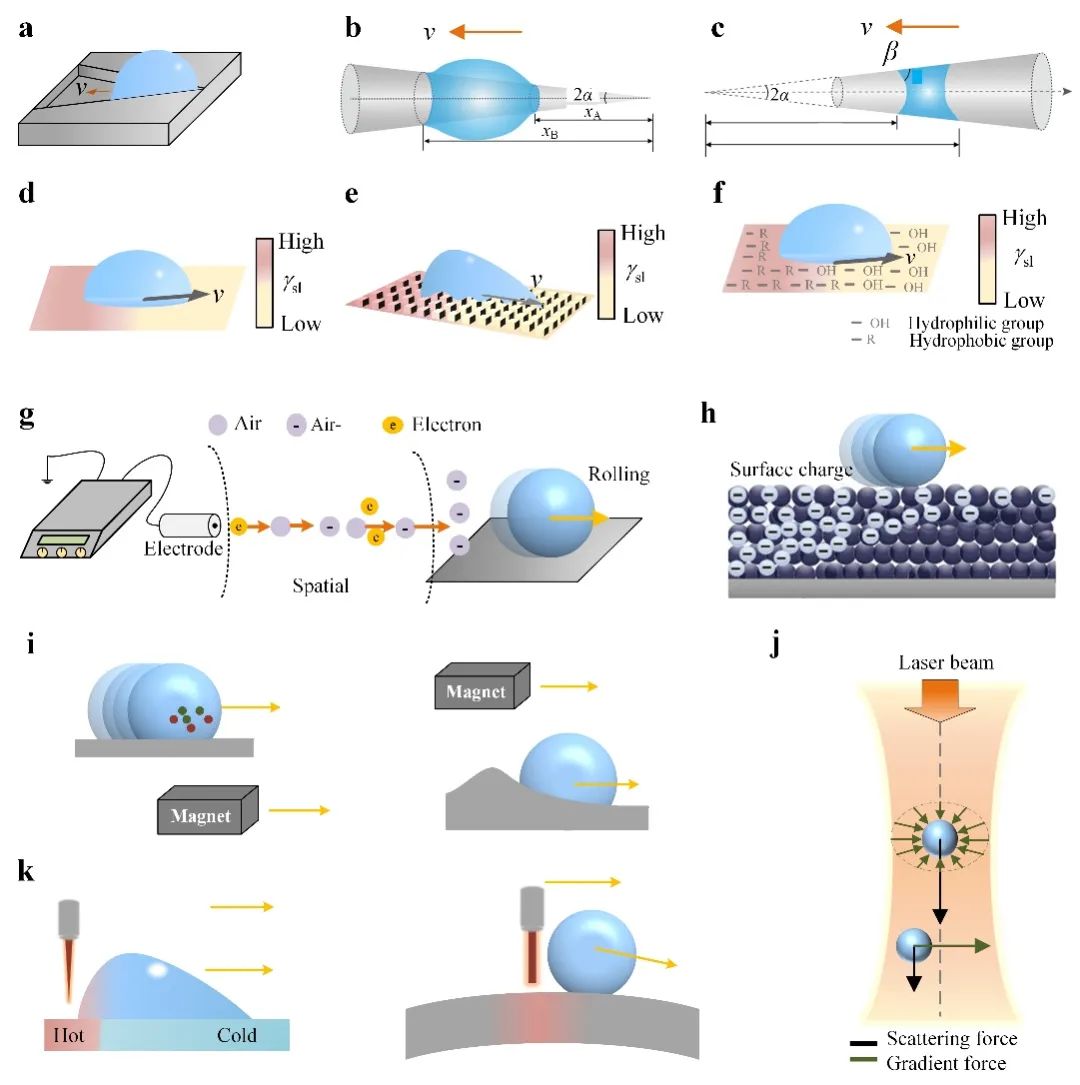
图1 固体表面液滴定向运动的基本原理:(a-f)被动策略;(g-k)主动策略
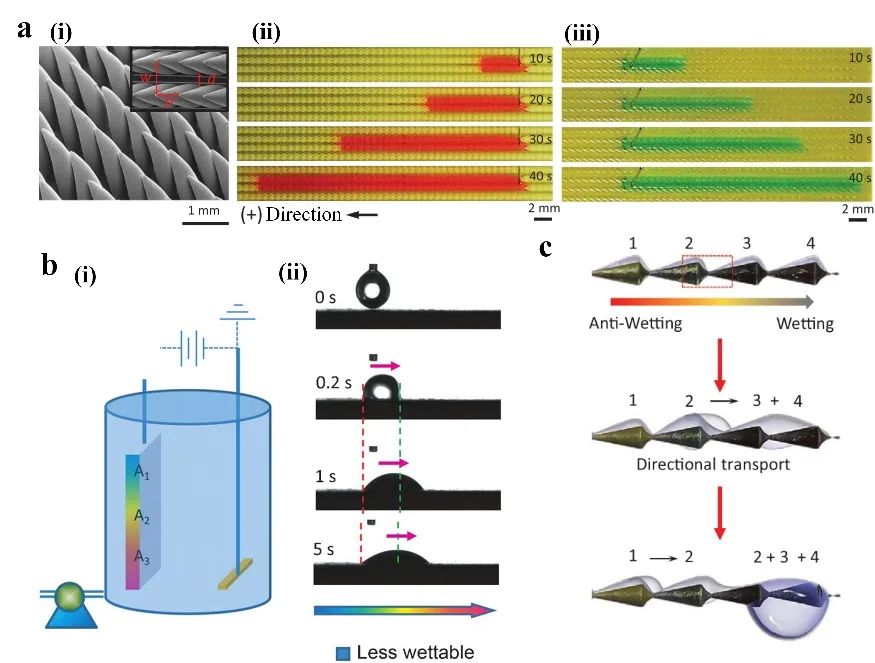
图2 基于被动策略的各向异性表面:(a)几何各向异性表面;(b)润湿各向异性表面;(c)协同各向异性表面
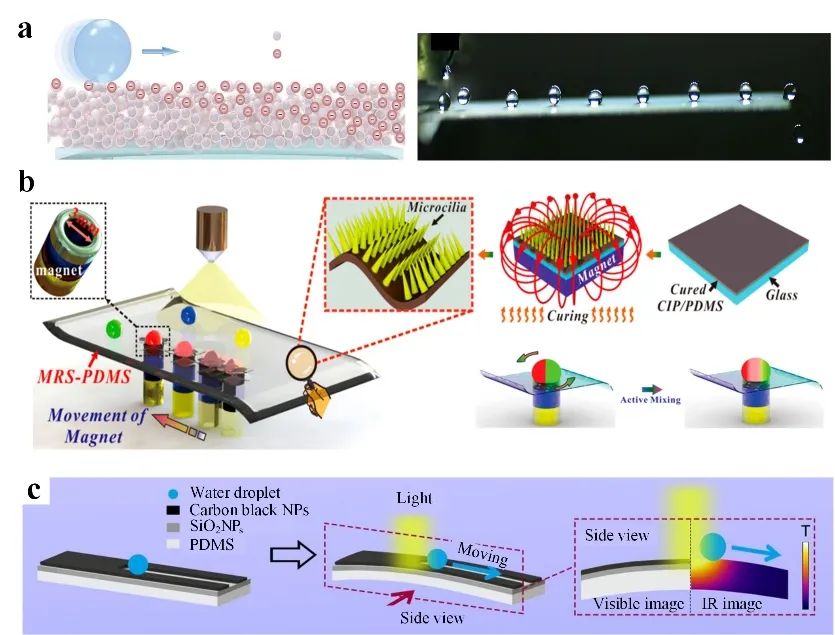
图3 基于主动策略不同外场操纵液滴方法:(a)电场;(b)磁场;(c)光场
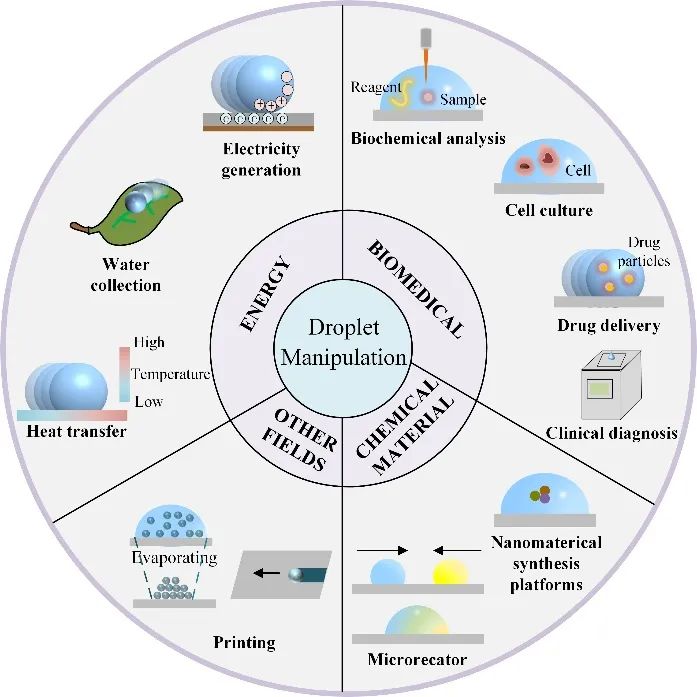
图4 仿生液滴操纵材料的应用领域
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
