创新点:清华大学机械系赵慧婵、林中汉等仿照人体肩关节设计了能够三自由度大范围稳定转动的球关节,研制了螺旋型气动人工肌肉纤维并使多根纤维聚集成束状作为驱动器,使用外柔内刚的布置方案研制了仿人上肢肌肉骨骼单元,实现了多自由度和带载运动,具备应用于仿人上肢机械臂的巨大潜力。
关键词:Advanced Intelligent Systems,软材料,多自由度关节,人工肌肉,仿人上肢机械臂
工业中,机械臂常常用于帮助人们来抓取、移动或操作物体,提高了生产效率。然而却很少有机械臂或是机器人进入人们的日常生活,由于其庞大的体积和刚性的部件所带来的人机交互风险限制了它在人们生活中的应用。目前,学者们使用软材料研制机器人或是机械臂,使其具备柔顺性、鲁棒性和人机交互安全性,具有应用于人们生活的巨大潜力。
清华大学机械系团队从人体上肢关节和肌肉中获取灵感,设计了一种由多束螺旋型气动人工肌肉纤维束驱动的三自由度肌肉骨骼单元,通过外柔内刚的布置方案和三自由度仿生关节实现了柔顺性和运动稳定性,同时具备高负载自重比和体积紧凑的特点。
螺旋型气动人工肌肉纤维是该团队提出的一种新型人工肌肉,其完全由软材料制备而成,内层为中空圆柱体,而外层为杨氏模量更高的螺旋型结构。在预拉伸的布置下,螺旋型人工肌肉纤维可以通过充放气来控制两端拉力的大小,从而对外部做功。其能量密度约为36J/kg,高于人体肌纤维能量密度(10J/kg)。
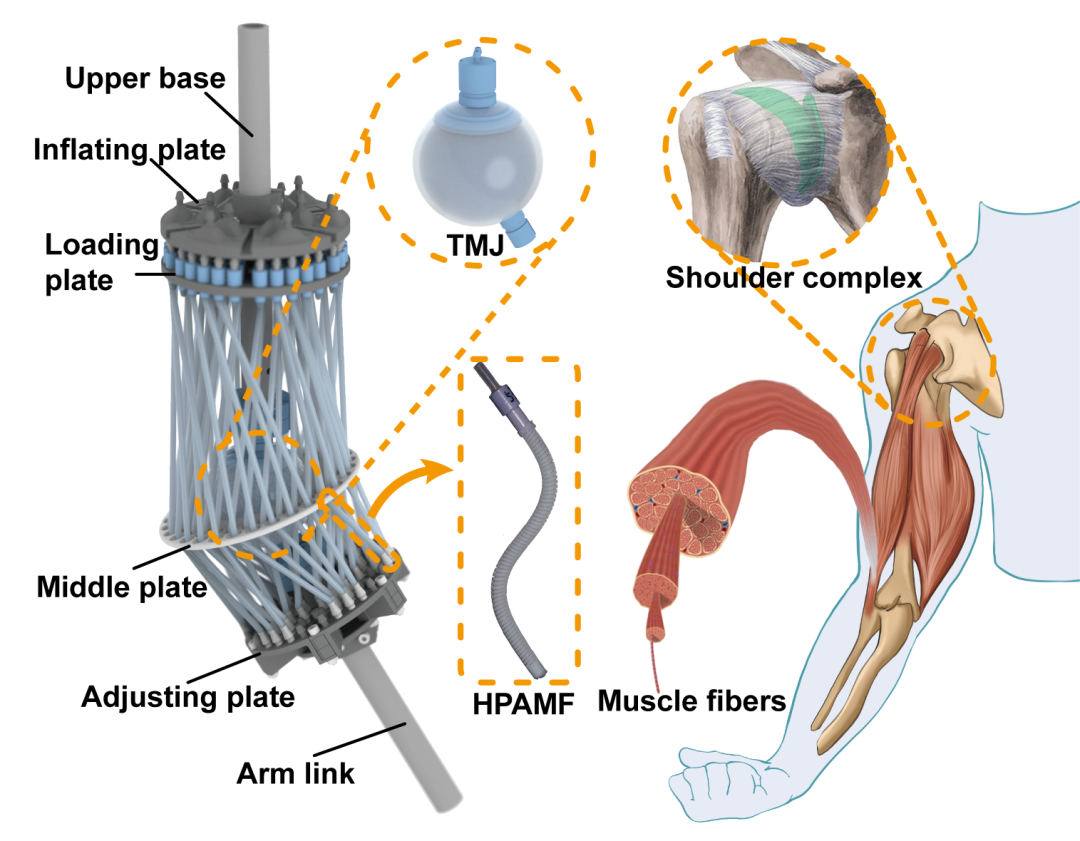
图1 螺旋型气动人工肌肉纤维
模仿人体的肩关节,该团队还提出了一种仿生球关节。该关节机械臂所需的多个自由度集成至单个关节,减小了关节的体积和重量,并且在三个转动自由度上均能够实现与人体肩关节相近的大转动范围(>220度)。同时,由于内部的静水压力,该关节可以在竖直方向上承受一定的负载(>100N),使其球盖和球头不易分离,保证了关节转动的稳定性。
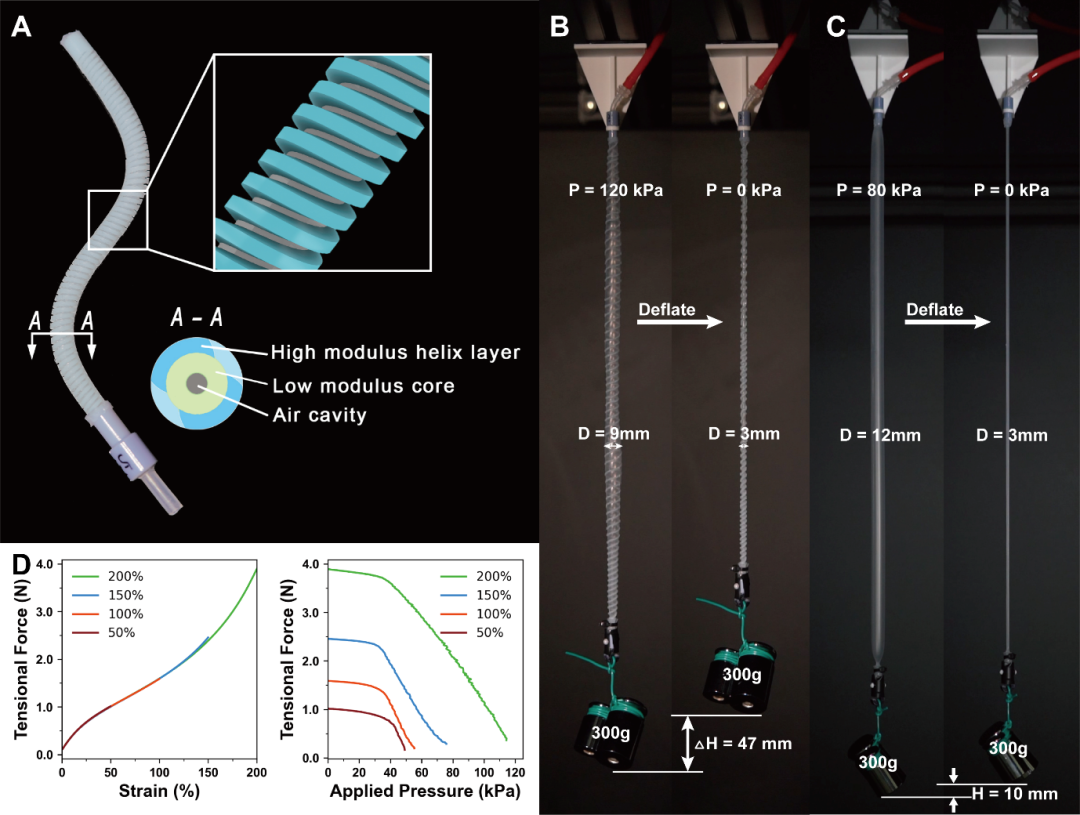
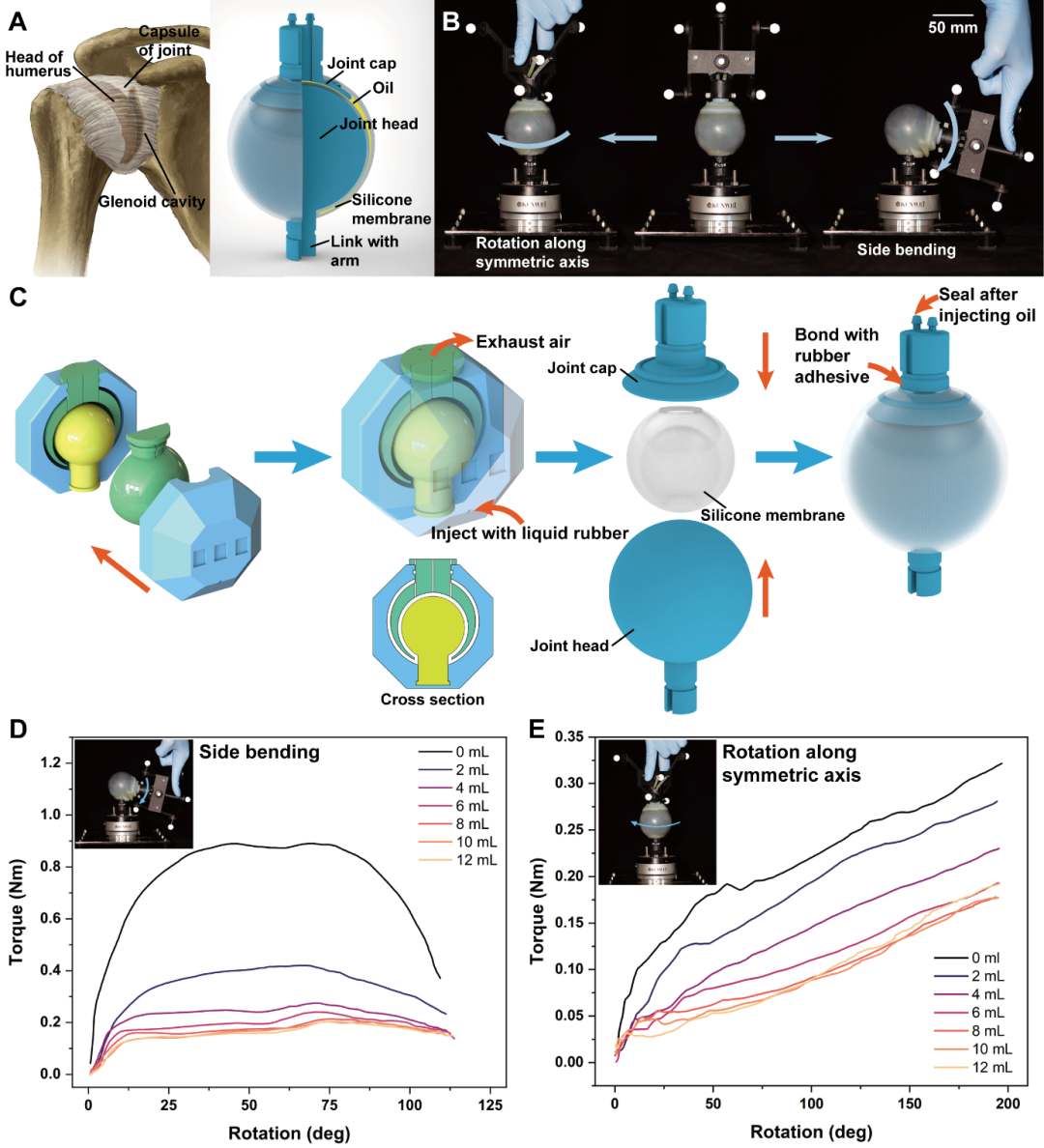
图2 三自由度仿生球关节
最终,通过集成多根螺旋型气动人工肌肉纤维成束状,以交叉排布的构型布置在球关节外侧,研制了仿人上肢肌肉骨骼单元,实现了三个自由度的稳定运动,并具备一定的负载能力,为下一步研制仿人上肢机械臂打下基础。
该论文的第一作者为清华大学机械系2019级博士研究生林中汉,通信作者为清华大学机械系赵慧婵副教授。其他合作者包括清华大学机械系刘辛军教授和2022级博士研究生邵琦。
以上文章转载于微信公众号 AdvancedScienceNews,如有侵权,请及时联系我们修改或进行删除。
