背景:自然界中的生物结构和运动启发了小尺度下液体操作和微型机器人学的新思路,例如定向运输液体的仿生功能界面(灵感来源静态的植物结构,如猪笼草、南洋杉叶…)、执行仿生游动或微尺度液体泵送的人工微型机器人系统(灵感来源动态的生物运动,如细菌、草履虫…)等等。前者受限于固定化的结构而缺失灵活受控性;后者需要持续被外部能量场驱动,且复杂的多模态类纤毛运动仍难以受控和灵活切换。这些限制使得静态/动态仿生系统对许多小尺度的复杂操作任务仍具有挑战性。
受松针和生物纤毛的联合启发,研究人员提出了一种兼具“静态”和“动态”特征的智能化不对称磁柱结构微型仿生驱动器(AI-MPA)。在外部磁场的控制下,AI-MPA显示出全空间下任意方向的液体输运能力(包括:①无能量输入的静态运输模式;②外磁场驱动的动态运输模式)。此外,联合材料的磁弹性力学特征和不对称的类松针结构设计,AI-MPA可在精准的磁场控制下实现二维/三维仿生纤毛搏动模式的自调节,这种智能性被进一步用于开发多自由度的微型机器人(包括爬行和旋转运动)。结合了现有静态和动态仿生系统的优势,提出的AI-MPA展现了以前无法实现的智能自我调节。这项工作为日益功能化和智能化的微型仿生系统提供了新的见解,其应用包括但不限于定向液体输运和机器人运动。该工作以“Natural Cilia and Pine Needles Combinedly Inspired Asymmetric Pillar Actuators for All-Space Liquid Transport and Self-Regulated Robotic Locomotion”为题发表在近期的《ACS Applied Materials & Interfaces》上。香港科技大学申亚京教授课题组博士研究生苗佳麒和孙思琦为文章共同一作。该研究获得国家自然科学基金委、深圳市重点基础研究项目基金委和香港研资局的支持。
1. AI-MPA的联合仿生设计概念
“生物纤毛在个体水平上展示出丰富且复杂的二维/三维非对称搏动模式,这些单纤毛的运动行为进而又在集体运动中出现了自主的协调,形成如异时波(metachronal wave)等的交互方式,为各类生命系统提高了诸如自推进、营养捕获、废物清除等重要生命活动的效率(图1a)”,苗佳麒谈到,“我们构造了阵列化的微柱来模拟生物纤毛群,并采用了外部磁场这一快速响应、无侵入性、易于控制的驱动方式。”孙思琦指出“这项研究未采用过往人工纤毛常见的结构(圆柱状、圆锥状等),而是借鉴了松针的结构特征,即一面曲率化、一面平面化的非对称构造。这些非对称特征(如倾斜、曲率、梯度等)对于设计可控方向液体运输界面提供了更多的可能”。为实现AI-MPA的控制,项目团队采用了外部磁场辅助的方式,使得掺杂在纤毛阵列中的磁性颗粒进行自组装排列(图1b)。进而在磁场的驱动下,制作的AI-MPA可以实现动态的二维/三维类纤毛运动,和类静态的松针阵列的梯度布置(图1c)。
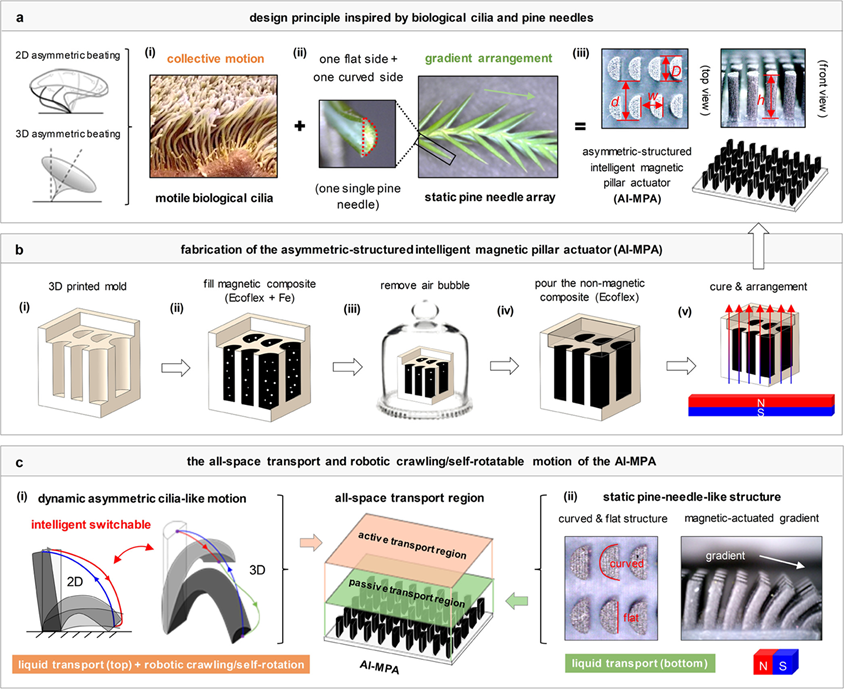
图1:AI-MPA的(a)仿生设计概念、(b)制造和(c)仿生功能示意图。
2. AI-MPA的二维/三维仿生纤毛搏动自协调
研究人员首先展示了单根磁柱(也称为人工纤毛)在磁场下的多种仿生运动模式。在振荡磁场下,单根“纤毛”可实现对称的二维摆动,整个过程中磁力一直占据主导作用(图2a)。这种情况下,人工纤毛的静态弯曲特征是完全可以被调控的。而真实的二维纤毛搏动,是在往复周期中执行非对称路径以获得净推进流量,进而打破低雷诺数下的物理环境限制。因此,研究人员考虑施加周期化旋转磁场来实现磁力和弹性力交替主导的搏动模式,即二维非对称搏动(图2b,c)。具体地,在磁场力施加下达到弯曲极限的人工纤毛,会改为弹性力主导而快速回弹,并呈现类似生物纤毛一样的非对称运动特征。在施加不同磁场下,研究人员提取了主要运动参数的数据,研究了外部能量场和内部力学模型耦合下差异的人工纤毛搏动模式(图2d)。
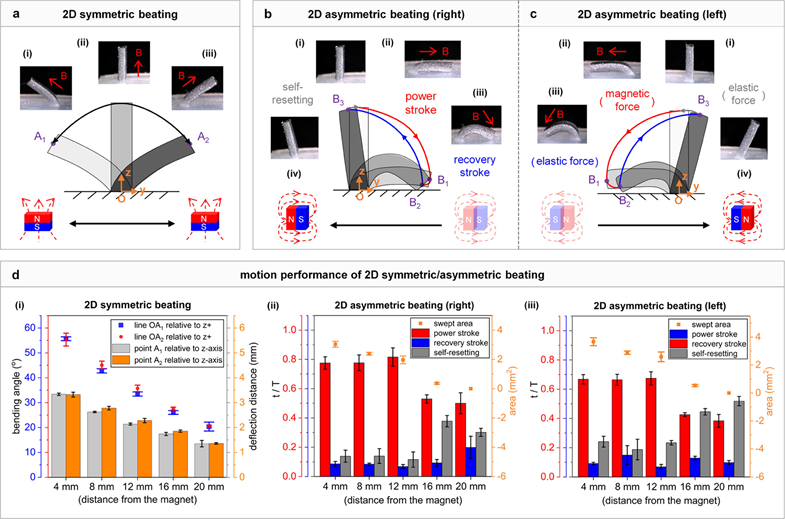
图2:人工纤毛的二维仿生(a)对称/(b,c)非对称搏动模式的实现;(d)运动数据分析。
进一步,由于具有松针启发的非对称结构设计,研究人员指出单根磁柱还可在不同平面内的圆周磁场驱动下展示出多力耦合的二维/三维搏动自协调性(图3a)。当圆周磁场不处在Y-Z平面时,达到弯曲极限的人工纤毛会先受到非对称结构导致的内应力不平衡,而表现为优先发生回转运动(从二维到三维搏动),最后在弹性力主导下复位。这样的特征复刻了生物纤毛的主要三维运动特征,即偏离法向轴旋转的三维轨迹。重要的是,这为二维和三维仿生纤毛运动的转换控制提供了简单的策略,优化了目前的磁场控制和系统设置。作者在分析了实现机制后,进一步提供了实验验证和相应的运动参数优化分析(图3b)。
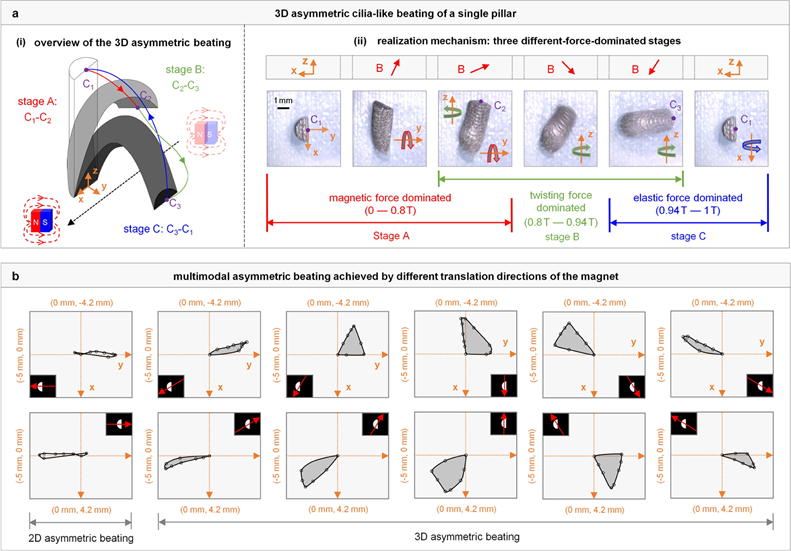
图3:人工纤毛三维仿生非对称摆动模式的(a)实现,和(b)与二维摆动模式的自调节与优化。
3. AI-MPA的全空间液体运输机制和实验展示
利用AI-MPA磁柱间的空间分布差异,研究人员通过移动的外部磁场构建磁柱间异时的仿生协调。具体来讲,相邻的磁柱依次进入各自的搏动周期,并且规则的周期相位差构造了高效的运输模式,这种被称为异时运动的纤毛集体行为在自然界中广泛存在,如游动的草履虫和人类肺部纤毛排出粘液的过程等。这种动态的运输策略可以将磁柱上方的液体朝异时波传递方向的反向运输,进而构造了上部的主动液体运输区(图4a)。而磁柱周围的底部区域,研究人员描述了构造的两类液体运输机制。其一,是曲率化非对称单元间形成的不对称流道,使得拉普拉斯应力作为驱动力实现液体的定向运输;其二,是由外部磁场驱动下形成的梯度化布置(类似松针阵列),不平衡的表面张力使得液体永远趋于梯度下降的方向流动(图4b)。此外,这种动态的异时协调还受到外部磁场的影响,研究人员分析并量化了这一影响参数(图4c,d)。
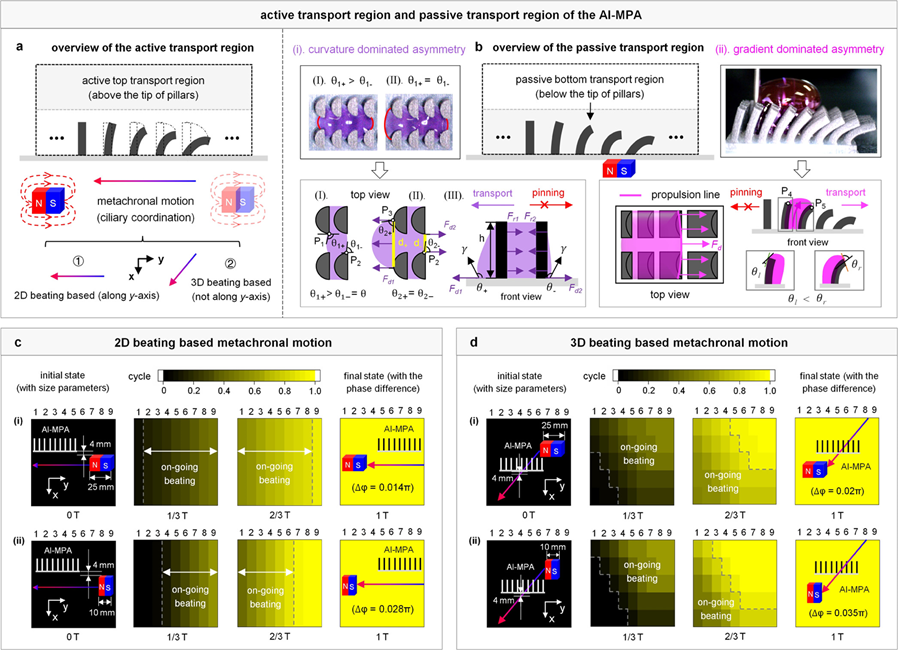
图4:在磁场驱动下,AI-MPA的(a)静态和(b)动态集体协调的全空间液体运输机制;(c,d)异时运动的数据分析。
如图5a的实验示意图,上部区域液体位置的改变用漂浮在高粘度硅油内的油滴来显示,在不同的外部磁场驱动下,研究人员展示了往复和斜向传递的异时波,八个周期后,液滴都各自朝着所驱动的异时波的反向运动(图5b),详细数据见图5c。而对于底部区域的液体运输,根据之前提到的两类静态运输机制,研究人员展示了初始状态下液体的定向运输能力,和在梯度磁场介导下,液体输送速度和方向的灵活可调控性(图5d)。
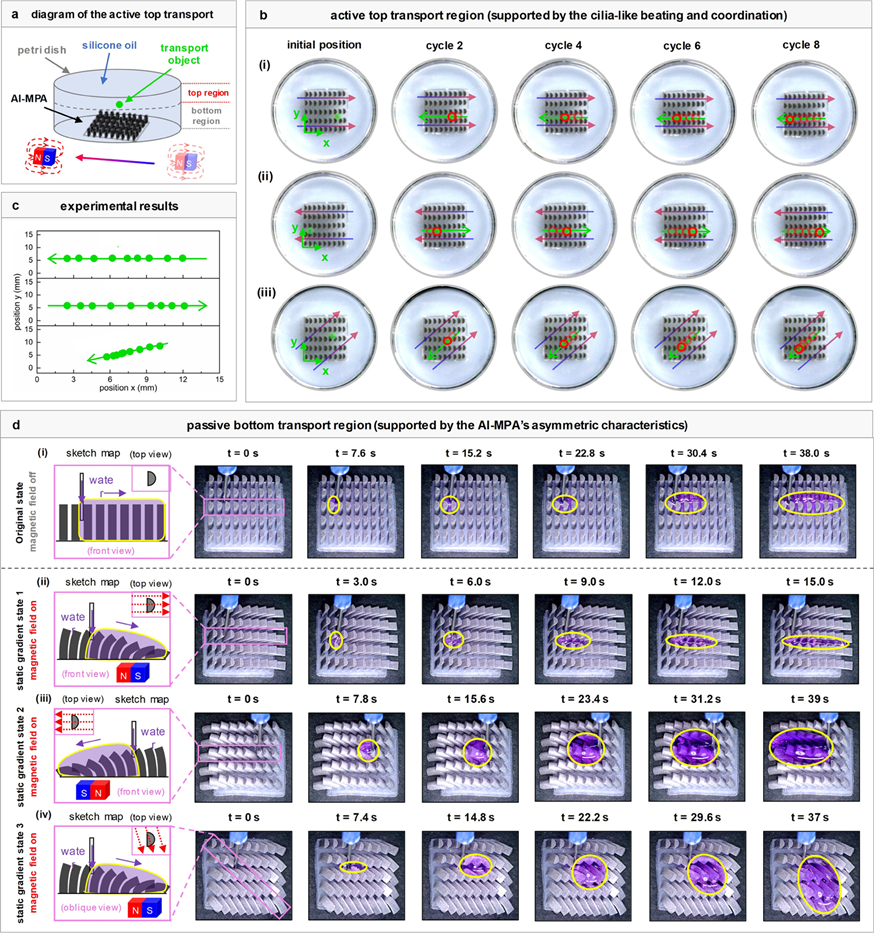
图5:AI-MPA在全空间下的(a,b,c)动态/(d)静态液体运输实验。
4. AI-MPA用作微型机器人来实现多自由度运动
最后,研究人员展示了AI-MPA二维/三维运动自协调能力对于微型机器人领域的潜在价值,当二维搏动的单根磁柱被拓展到群体化的异时协调下,AI-MPA可用于实现机器人的爬行运动。一个运动周期具体包括先经历一个较长时间的回撤运动阶段(磁力主导),而随后较快响应的前进阶段(弹性力主导),最终实现向前的净位移并与异时波传递方向同向(图6a)。而当异时协调的人工纤毛在执行三维搏动时,AI-MPA展现的新自由度可用来执行自旋进爬行,且改变驱动磁场的方向可进一步调节旋转的顺/逆时针方向(图6b)。
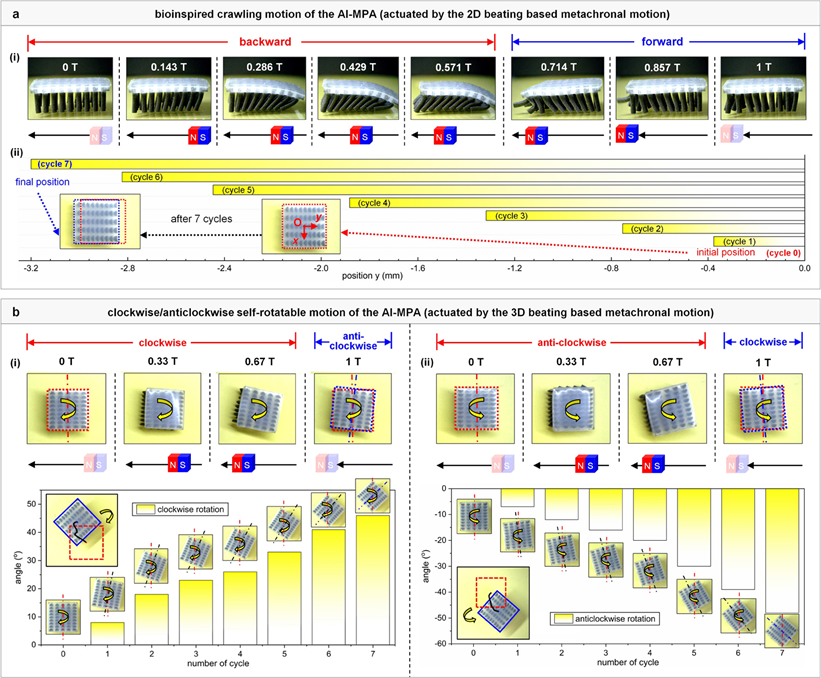
图6:基于AI-MPA二维/三维运动自协调开发的三自由度微型机器人:(a)爬行;(b)顺/逆时针旋转。
上述工作是香港科技大学电子与计算机工程系申亚京教授团队在仿生微型机器人系统方面的最新进展之一。项目团队致力于可用于生物医学工程、人机交互等领域的微型机器人系统、接口及器件,前期成果已发表在Science Robotics, Nature Communications, PNAS, IEEE Transactions on Robotics, Light: Science & Applications, Engineering等期刊上。
以上文章转载于微信公众号化学与材料科学,如有侵权,请及时联系我们修改或进行删除。
