设计运动灵活、负载高、顺应性好的灵巧手是机器人领域长久以来的挑战。近年来,软材料的使用和软体机器人技术的发展赋予了灵巧手良好的操作顺应性和安全交互能力。然而,这也使此类灵巧手的侧向刚度较低,负载受限。虽然现有的变刚度技术(如形状记忆材料、真空阻塞)能够提升使灵巧手的侧向刚度,但这些技术通常存在响应缓慢、运动受限等弊端。
针对这一问题,我们从人类手指的自主变侧向刚度机制中寻求解决方法。我们发现:由于手指关节韧带的张紧效应和关节面骨脊的干涉效应,在打字、抓取大型物体等手指弯曲角度较小的任务中,手指的侧向刚度低,侧向活动范围大;在抓取重物、操作工具等手指弯曲角度较大的任务中,手指能够自主增强侧向刚度提升载荷和稳定性。

由此,我们设计了一种仿生刚柔复合手指(简称BSH手指),在保证运动灵活性和关节柔顺性的前提下,实现自主侧向刚度增强。该手指由掌指关节和指间关节构成,具有两个弯曲自由度和一个侧向(外展/内收)自由度。其中,掌指关节具有椭圆形的人工脊和偏心布置的侧副韧带,由于人工脊的接触干涉和韧带的偏心张紧效应,手指的侧向刚度可随关节弯曲实现自主增强。同时,关节上集成了气动人工肌肉以实现柔性驱动。进一步,基于该手指原型,搭建了四指灵巧手样机,并通过实验验证了该灵巧手在抓取任务中的自主刚度增强特性。相关成果以“A Biomimetic Soft-Rigid Hybrid Finger with Autonomous Lateral Stiffness Enhancement”为题发表于Advanced Intelligent Systems 期刊。(见文末链接[1])。
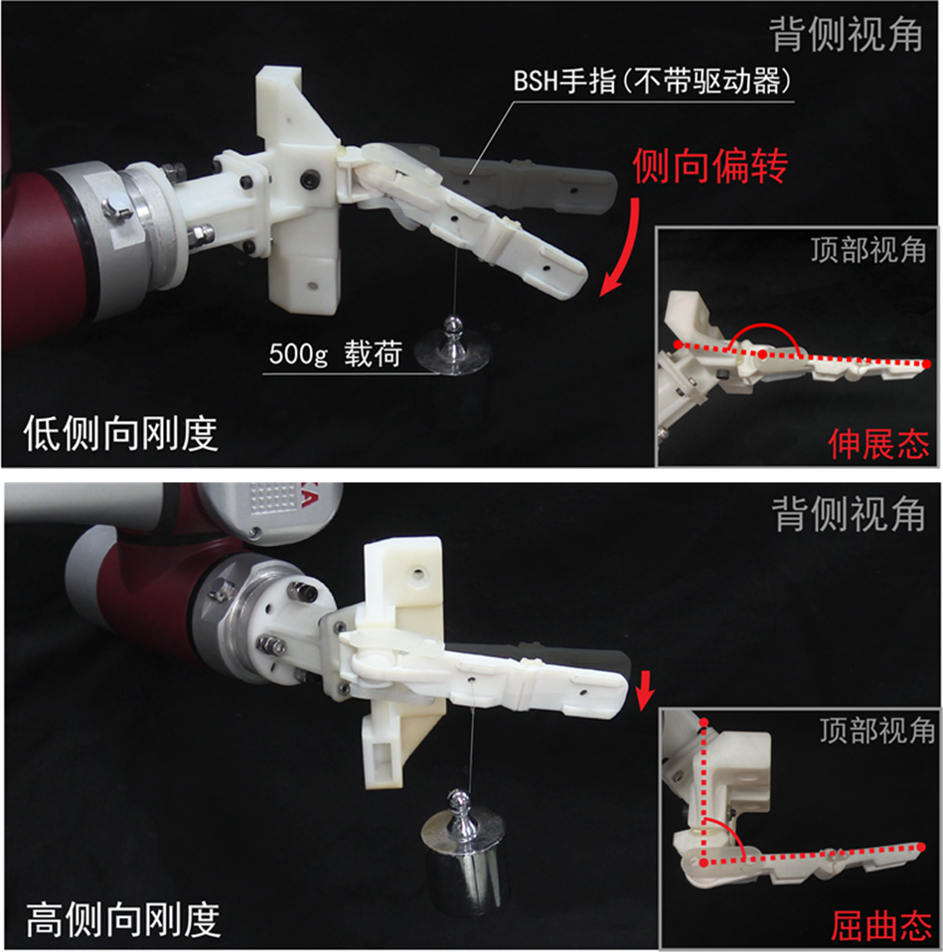
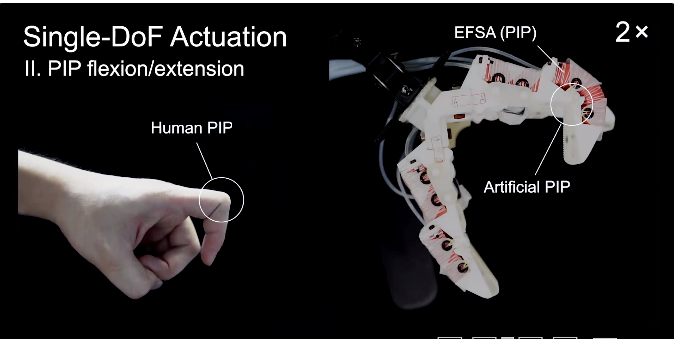
图1 手指分别在伸展和屈曲状态下的侧向刚度演示
手指设计
1. 自由度设计
BSH手指的骨架由三节指骨和两个关节构成,除了两个弯曲自由度和一个侧向(外展/内收)自由度外,还具有一个绕手指轴线旋转的被动自由度,具有良好的交互顺应性。
2.掌指关节设计
人工掌指关节的近端关节面(掌骨侧)为一个球面,远端关节面(指骨侧)为一个包裹着球面的环状面。仿照人手掌骨腹侧突出的骨脊状结构,我们在掌骨左右两侧设计了突出于球形关节面的两个椭圆形人工脊。当关节逐渐弯曲,指骨底和人工脊的距离缩小,骨脊同指骨形成渐趋稳固的接触,限制指骨的左右侧偏,逐渐压缩关节的侧向工作空间。关节的侧副韧带由硅胶制成,布置上依照人掌指关节韧带起于掌骨背侧,插入指骨掌底的特点。如此布置的韧带会随着掌指关节的弯曲,产生被动的伸长张紧,对关节施加较大的压力,并能够产生更大的回正力矩。
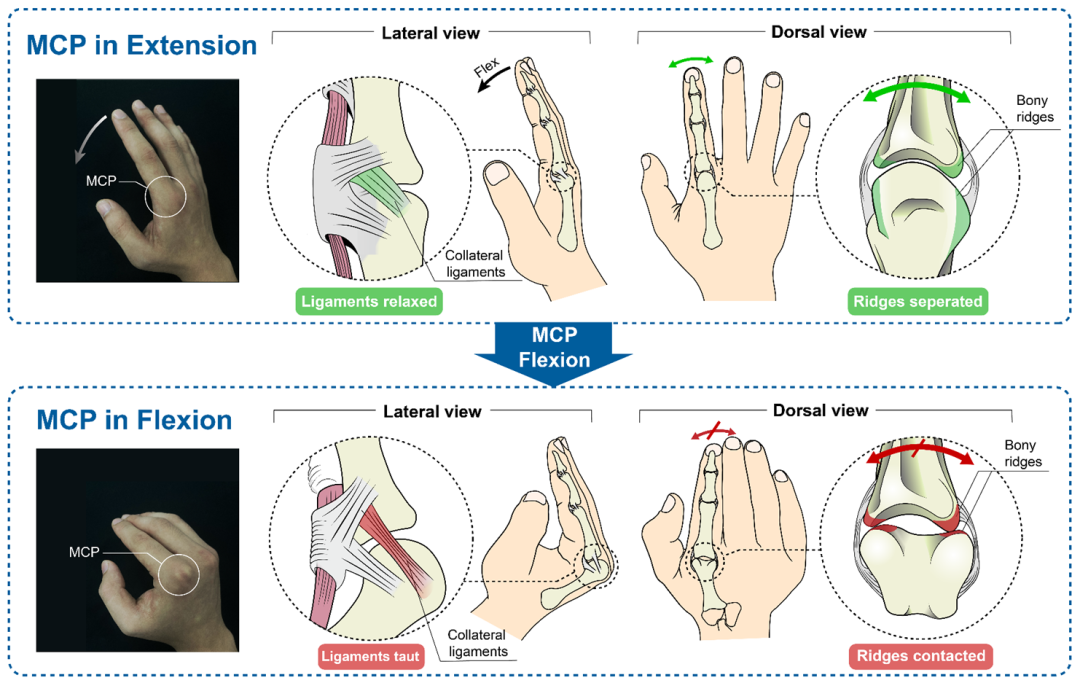
图2 人手指的掌指关节分别在伸展状态(上)和弯曲状态(下)的侧副韧带(左)和骨脊(右)状态图
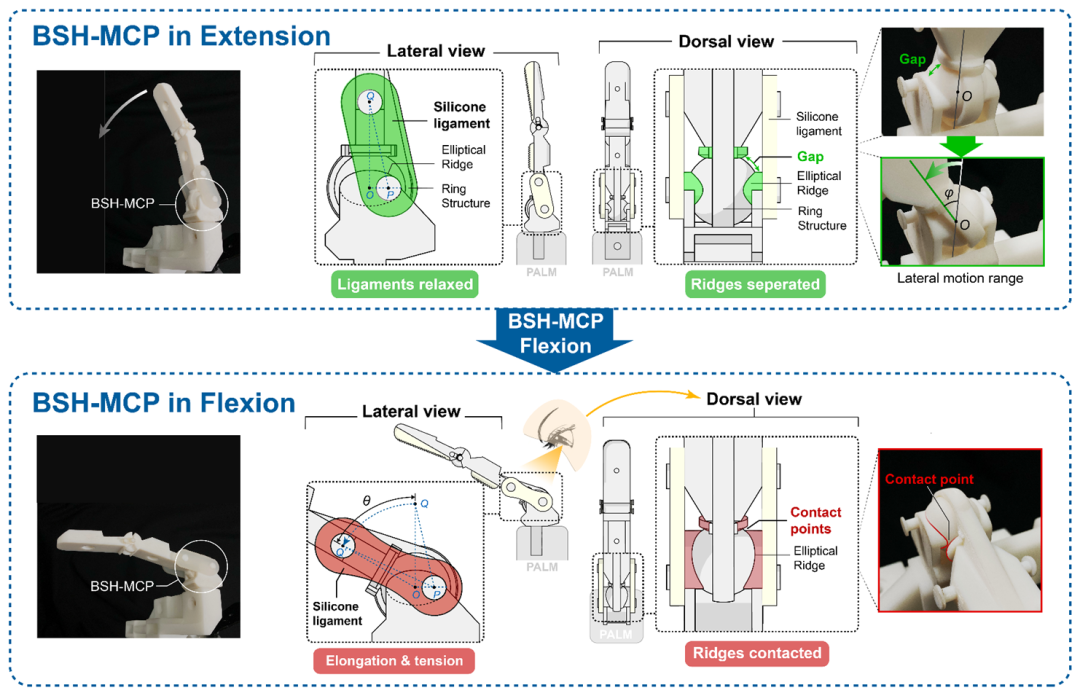
图3 人工掌指关节分别在伸展状态(上)和弯曲状态(下)的侧副韧带(左)和骨脊(右)状态图
3.指间关节设计
人工指间关节为单自由度关节。关节面的设计仿照人指间关节的驼峰形关节面,具有较强的运动导向性。侧副韧带的材料为不可伸长的尼龙纤维。在韧带和关节面共同作用下,关节几乎无法产生侧偏。
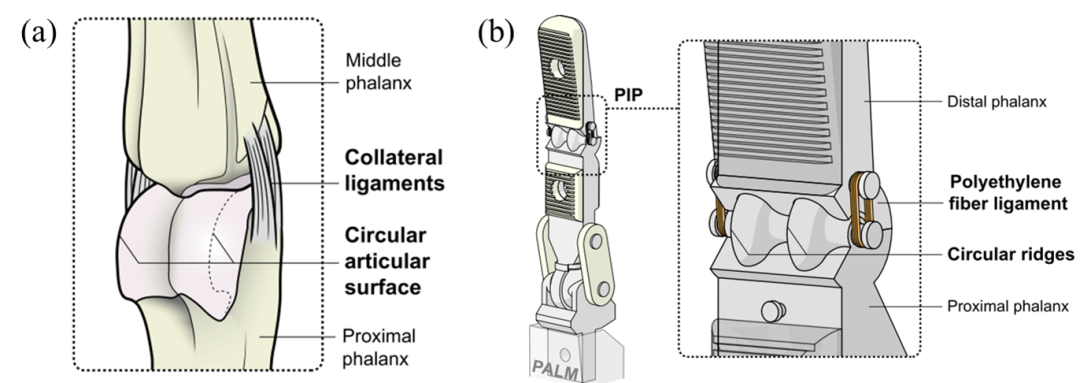
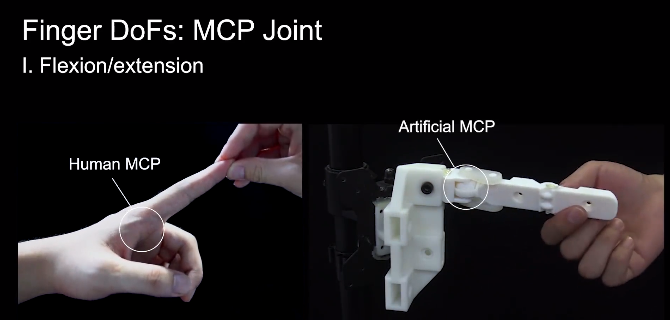
图4 人手指(左)和人工手指(右)的指间关节结构
实验测试
1、刚度表征
我们对不同弯曲角度(0-90°)下的BSH手指进行了侧向加载实验,发现随着掌指关节弯曲角度逐渐增大,挂载不同长度侧副韧带的BSH手指的侧向刚度均有显著的提高,验证了偏心硅胶韧带设计的有效性。其中,挂载12.5mm韧带的BSH手指,其最大刚度(90°)相较最小刚度(0°)提高了366%。
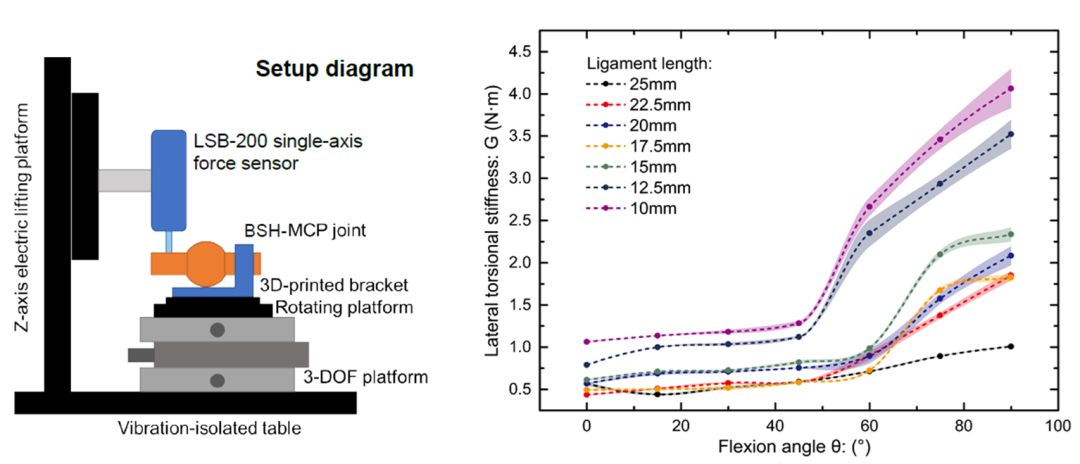
图5 侧向刚度表征实验装置图(左)与实验结果(右)
2.工作空间表征
我们使用动作捕捉系统对BSH手指进行了掌指关节工作空间表征,发现其工作空间和人手掌指关节高度相似,即随着弯曲角度逐渐增大,关节侧向工作空间发生显著的压缩。这一结果验证了椭圆形人工脊设计的有效性。
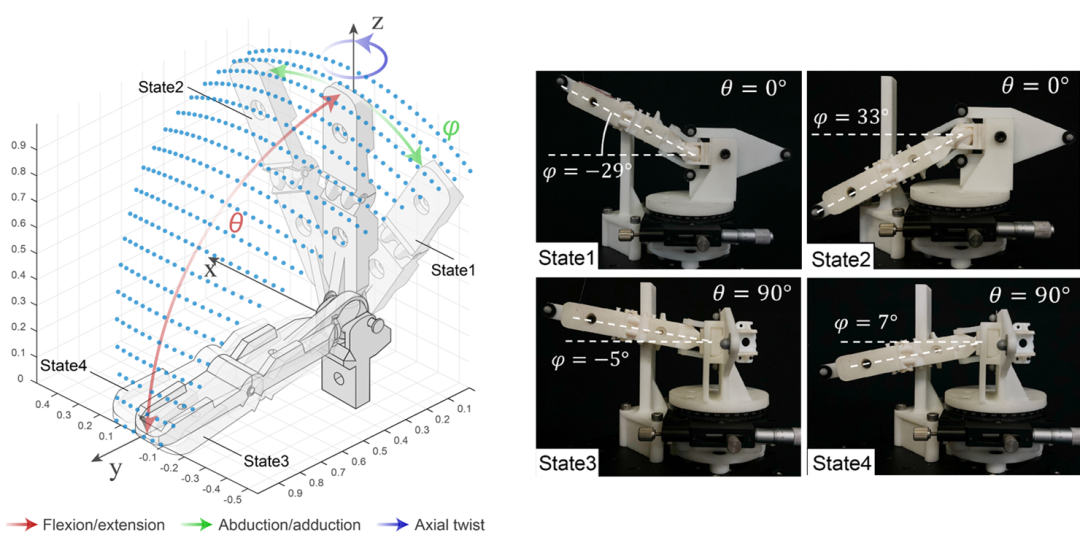
图6 掌指关节工作空间点云图(左)与边界位置特写(右)
驱动设计
为实现BSH手指的驱动,我们设计了EFSA和MCSA两款气动人工肌肉。EFSA用于手指弯曲自由度的驱动,采用纤维增强型结构设计,被固定于关节背侧,并由多层尼龙限制鞘覆盖,避免发生屈曲失效。MCSA用于手指侧向自由度的驱动,结构由内部的弹性体气囊和外部的保形织物组成,固定于关节侧面,相邻手指指间。
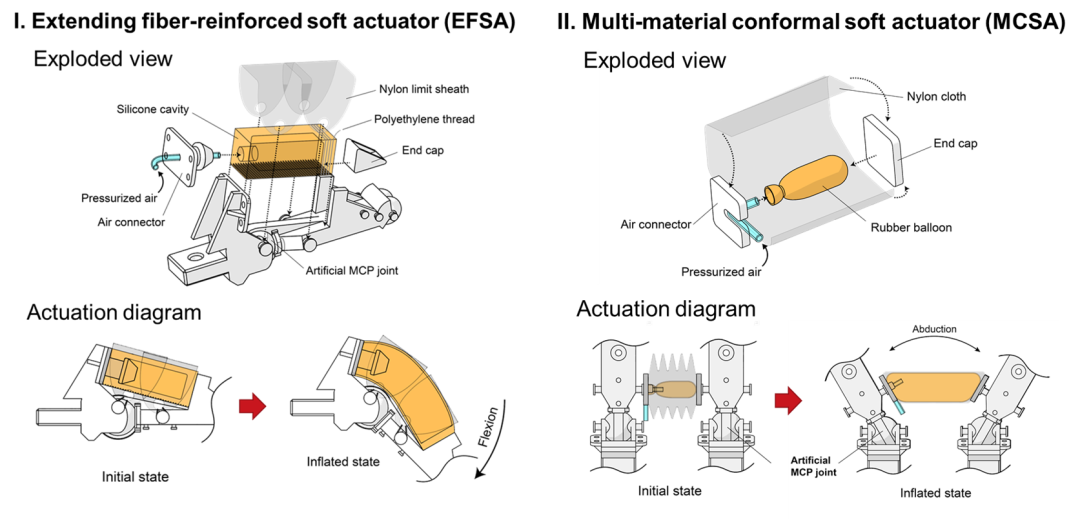
图7 EFSA(左)和MCSA(右)驱动装置结构与作动示意图
机械手设计
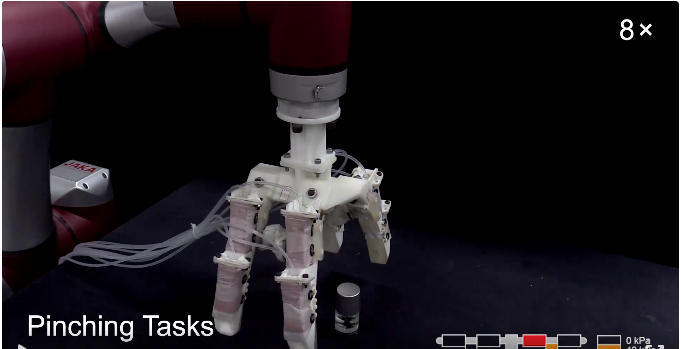
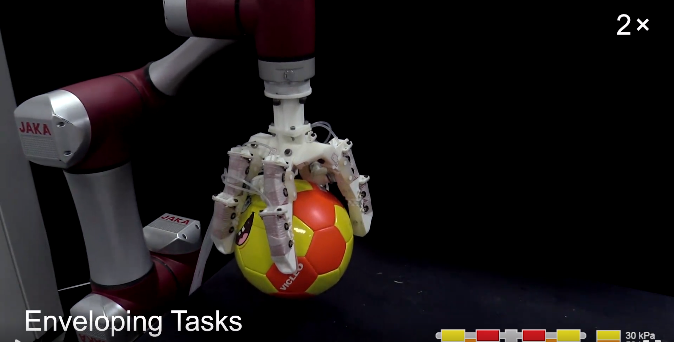
我们基于BSH手指和驱动设计搭建了一台机械手样机,包含四根BSH手指,能够完成三个基本的抓取手势:捏取、包络抓取和强力抓取。
抓取测试
我们选取了不同尺寸、形状的物体组成样品集,并按照样机的抓取手势分为三类,分别开展了抓取实验。
1、捏取
通过驱动单侧MCSA,样机可以实现对指的手势,用于抓取小而轻的物体。
2、包络抓取
通过驱动双侧MCSA,样机手指外展以笼络物体,用于抓取尺寸较大的物体。
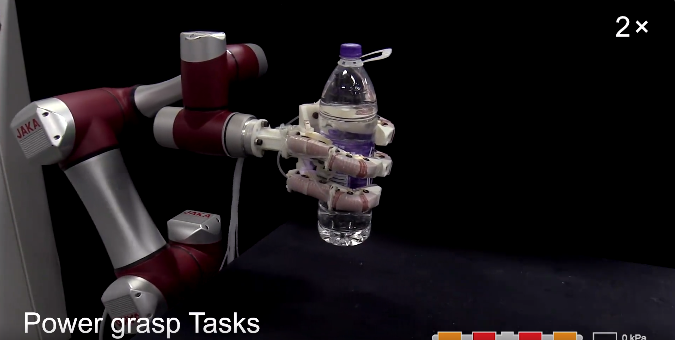
3、强力抓取
高气压驱动所有EFSA,样机手指大角度弯曲触发刚度增强,用于抓取质量较大的物体。在任务1中,重力方向与手指的侧向平行,样机实现了对1.54kg重物的抓取,并且几乎没有发生侧向偏转,保持了抓取的稳定。
4、总结
本工作提出了一种具有刚柔复合的灵巧手指设计,可以通过手指的弯曲运动实现侧向刚度的自主性增强。通过仿生人掌指关节的解剖结构,设计了椭圆人工脊和偏心的侧副韧带结构,利用人工脊接触干涉和韧带偏心张紧效应,手指可以根据屈曲姿态自主调整侧向刚度和工作空间。基于手指设计,开发了一款四指机械手样机,能够在人工肌肉的驱动下实现多种抓取手势。机械手的抓取实验证明,手指伸展时,BSH手指具有较高侧向活动度,使原型能够抓取不同大小的物体;手指弯曲后,侧向刚度增加,以增强对重物的抓取稳定性。
上海交通大学硕士研究生周佩韦为论文的第一作者,谷国迎教授为论文的通讯作者。该论文得到了国家自然科学基金,上海市科委“科技创新行动计划”等项目的资助。
以上文章转载于微信公众号 SoRoSJTU,如有侵权,请及时联系我们修改或进行删除。
