经过亿万年的自然进化,海洋动物们不仅游的快而且省力高效节能。受大自然的启发,研究者们设计了各种水里游动得软体机器人,但是软机器人游动速度相对太慢,接近每秒一个身长,远低于海洋动物的相对速度(每秒一到二十个身长),而且效率偏低。长久以来,实现快速且高效的软机器人一直困扰着软体机器人的研究者们。
近日,美国北卡州立大学的尹杰团队巧妙地利用双稳态结构设计了一款会仿人类蝶泳的低频轻质软体机器人(仅2.8克,驱动频率仅1 Hz),不仅游的快,平均速度每秒可达3.74个身长,瞬时速度可以高达0.45米每秒,而且高效低能耗可与海洋动物媲美。该工作以“Snapping for high-speed and high-efficient, butterfly swimming-like soft flapping-wing robot” 为题近日发表于“Science Advances”杂志上。团队博士生赤银鼎领衔第一作者,其它共同作者包括团队博士生洪尧烨、李艳滨和博士后赵耀。
该蝶泳软体机器人形状像蜜蜂,由一个软体启动驱动器为身体与两翼组成,如图1所示,弯曲且柔软的翅膀是类似于发卡的一种双稳态结构。通过驱动来上下弯曲身体,从而带动两翼的突跳(snapping)快速上下摆动与旋转。通过驱动器的充放气使得翅膀在往上和往下弯曲的状态来回切换。切换的过程是通过突跳实现的,突跳可以把积累的能量迅速释放,使得软体机器人瞬间获得很大的游速。于此同时,输入整个系统的能量反而很低,因此使得软体机器人同时具备快速和高效两种优势。
研究者们发现翅膀扇动的轨迹类似于数字8,这与蜂鸟和黄蜂翅膀的轨迹非常类似(图1)。为了实现这种复杂轨迹,往往是需要很多复杂的连接结构来组成传动系统。然而此种软体机器人却可以通过很简单的设计达到这种效果。
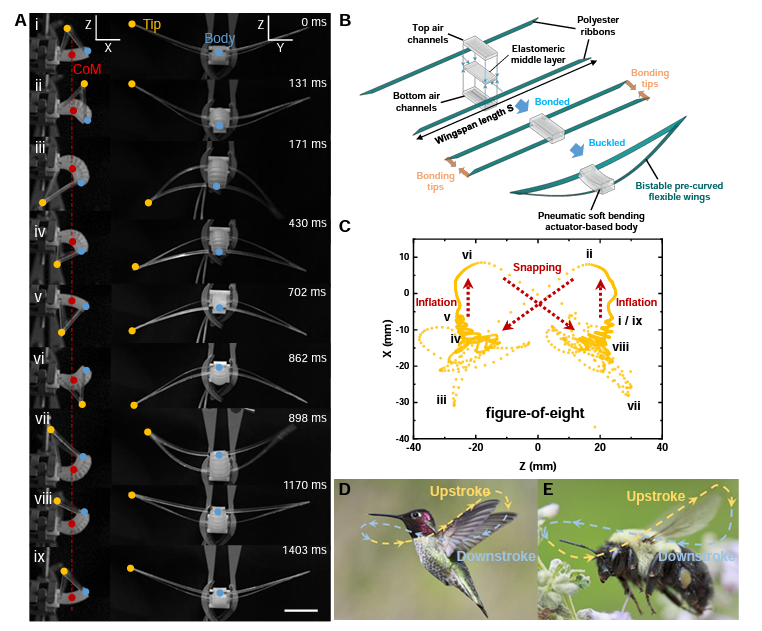
图1 蝶泳机器人驱动器的设计
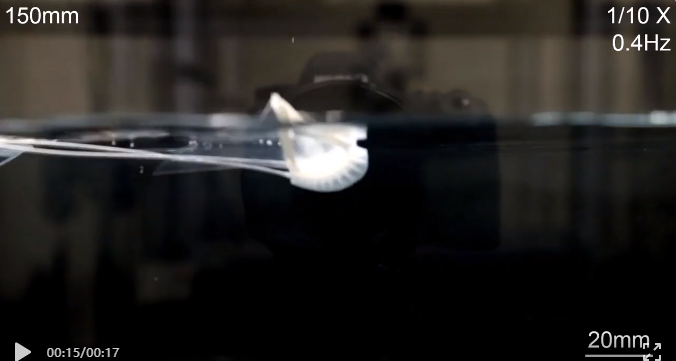
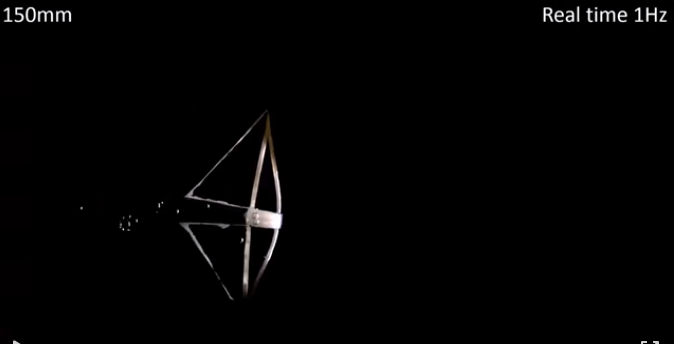
如图2所示,这种软体机器人的游泳姿态很像人类的蝶泳。每一次翅膀的拍打,都会使得能量迅速释放,从而使得软体机器人获得巨大的推力。随着游动,软体机器人的整个身体还会呈现波状起伏,这一点非常类似人类在蝶泳时由头部到躯干的波状起伏。不同的是,这种软体机器人不论是向下扇动还是向上扇动翅膀,都能获得巨大的推力。经过研究发现,这种软体机器人的最大平均游速可以达到每秒3.74个身长(约为85.27mm/s)。
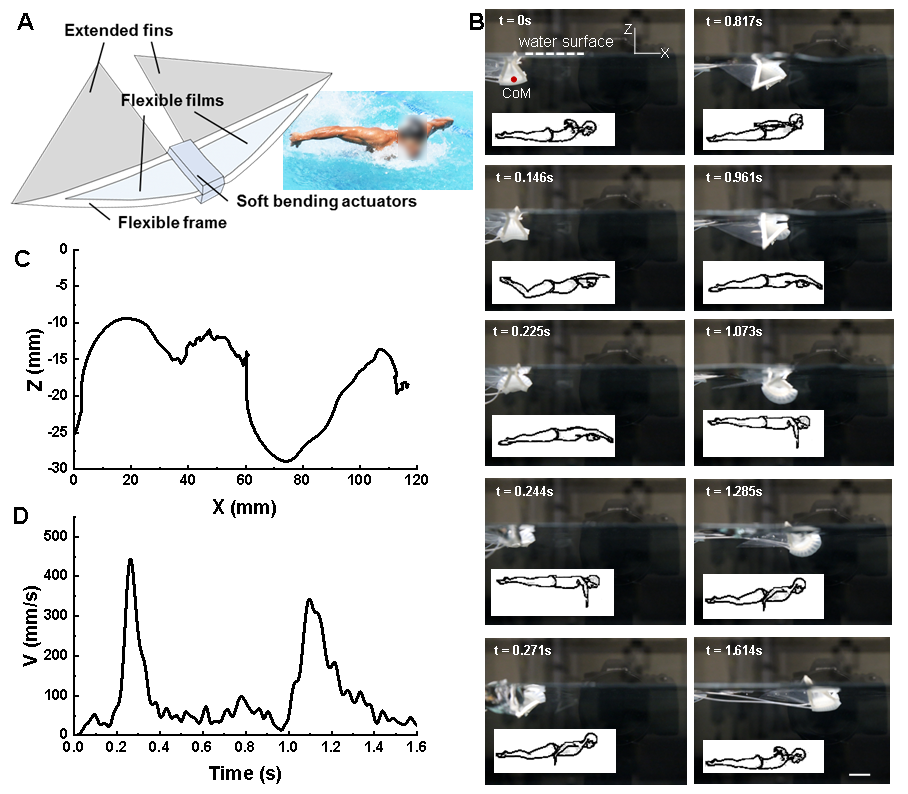
图2 蝶泳软机器人性能与姿态
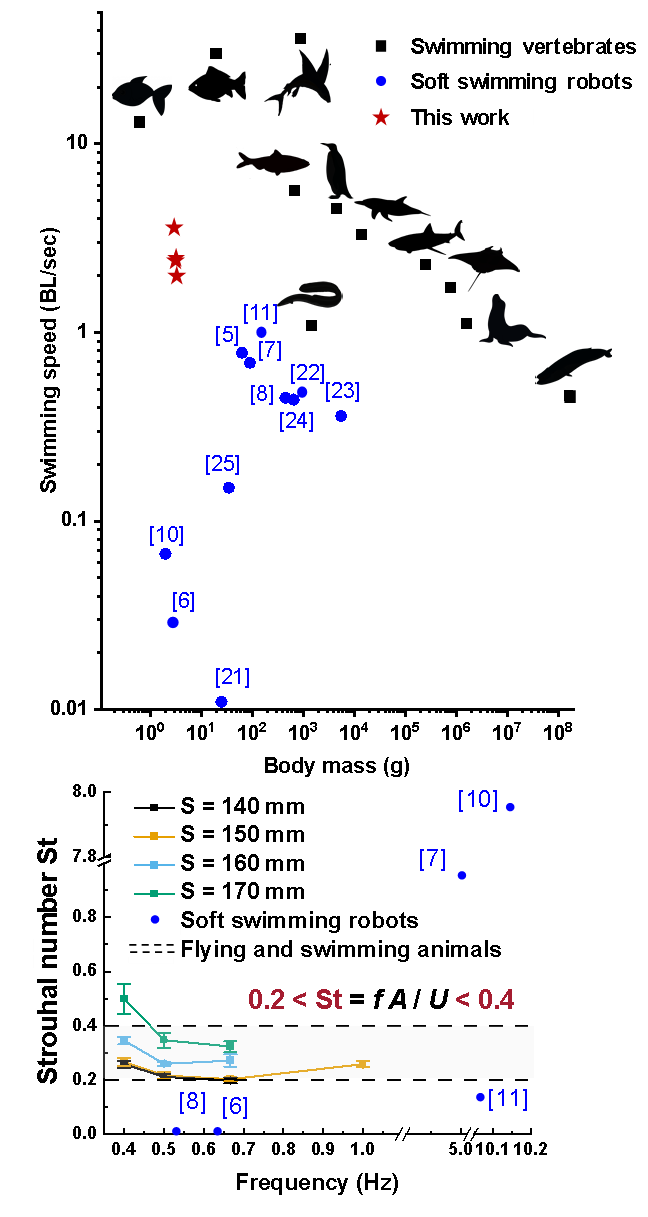
研究者们发现,这种软体机器人在具有高速游动能力的同时,自身的重量却很小。如图3所示,此种软体机器人比其他软体机器人具有更高的游速却有更小的质量。甚至和水生动物比较也是毫不逊色。研究者们进一步比较了用来评价游动效率的无量纲Strouhaul值,该值定义为摆动频率与摆动幅度的乘积与运动速度的比值,绝大多数鸟类和鱼类动物都落在了自然选择的生物区间,0.2-0.4之间的狭窄区间来获得推动的高能效。该蝶泳机器人的Stouhaul值均落在了这个狭窄的生物区间,间接说明其游动的高效与节能,但是同类游动软机器人却鲜有落在此区间。
研究者们认为这种软体机器人的设计也可以通过其他驱动方式进行驱动,也可以根据应用适当的调整大小,从而适应各种工作环境。
以上文章转载于微信公众号高分子科技,如有侵权,请及时联系我们修改或进行删除。
