类人机器人是外形和功能都与人类相似的智能机器,不仅可以为人类提供服务、帮助人类执行危险任务,而且其对生物功能的模仿反过来加深了我们对人类的了解认识。目前,放置大量传感器以获得更多的感知信息和实现高效计算是类人机器人的发展趋势。然而,由于冯诺依曼结构的限制,类人机器人面临着多重挑战,包括巨大的能量消耗、延迟瓶颈和缺乏仿生特性。在此现状下,神经形态器件,一种可以用来模仿生物神经系统中重要组件(突触、神经元、神经网络)功能的器件,展示了其突破冯诺依曼框架限制的能力。
忆阻器,一类神经形态器件,具备与生物神经系统高度相似的特点,在模仿生物神经系统方面发挥着重要作用。因此,为了更好地提升类人机器人的性能,需要系统地对忆阻器件进行回顾,并提供当前仿生应用的示例,以便忆阻器、类人机器人二者的协同发展。
北京航空航天大学高硕团队,香港中文大学胡国华团队等首次全面概述了基于忆阻器的神经系统以及其与生物神经系统的对应关系,以促进忆阻器神经系统于类人机器人中的应用。考虑到忆阻器领域和类人机器人之间的差异,作者介绍了生物神经系统以及如何使用忆阻器从不同层次(突触、神经元和中枢神经系统)模仿其功能,并概述了忆阻神经系统的应用,包括类脑计算、感知系统等。
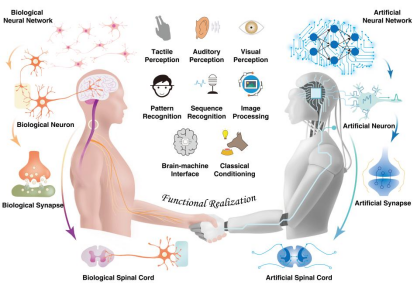
【图1】生物和人工神经系统的示意图。
人工神经系统可以从功能层面模仿生物神经系统,包括突触、神经元、神经网络和脊髓。
按照突触、神经元、中枢神经系统,作者们首先按此顺序综述了生物神经系统以及忆阻器实现相应功能的原理和目前的研究进展。突触部分重点在于基于忆阻器的突触模型以及突触可塑性的实现方法;神经元部分重点在于目前代表性的忆阻器神经元模型以及模仿神经元动态特性的实现方法;中枢神经系统重点在于基于忆阻器的中枢神经系统的结构以及代表性工作。之后概述了忆阻器神经系统在感知系统、类脑计算、认知学习和脑机接口等方面的应用。最后,作者们分享了该领域目前的进展以及面临的挑战和机遇,在挑战方面上,指出了忆阻器不理想特性和神经电路建模的缺乏对该领域发展的限制;在机遇方面上,分析了忆阻神经系统应用于类人机器人带来的优势和对人类自身认知方面的帮助。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
