亚毫米微型机器人凭借其尺寸优势,在航空航天精密维修、隐蔽侦察、环境监测、介入医疗等领域具有重要的应用前景。目前,亚毫米尺度上的微型机器人受限于驱动器响应速度、摩擦力调控及一体化成型等难题,其运动速度难以超过一倍身长每秒(1BL/s),而且需要特制的棘齿表面才能获得运动所需的各向异性摩擦力。
为解决上述问题,西北工业大学罗建军教授团队提出了一种光电双驱的3D微执行器,能够在完全释放后由平面二维形状通过热变形转变为复杂三维形状,并对低压电信号和光信号产生高达100Hz的快速响应。基于此团队开发了多种亚毫米机器人,能够通过激光进行无线控制,爬行速度最高可达2.96mm/s (3.66BL/s),旋转速度最高可达167.3°/s。除此之外,微型机器人能够在多种具有不同粗糙度的运动基底进行可靠运动,具有极强的运动适应性。对于复杂环境中的风险和意外情况,机器人还表现出了优异的故障安全和容错行为,能够在重量是其67000倍的探针挤压后恢复形状并继续运动,还能够在结构完全翻转的状态下以接近正常状态的速度进行运动,具有优异的鲁棒性。该微执行器及微型机器人通过MEMS工艺进行高精度并行化和批量化制造,能够在一张4寸硅片上同时集成数百上千个原理样机。相关成果以“ Multiresponsive Microactuator for Ultrafast Submillimeter Robots”为题发表在期刊《ACS Nano》。西北工业大学罗建军教授为论文的通讯作者,博士生惠旭晟为论文的第一作者。
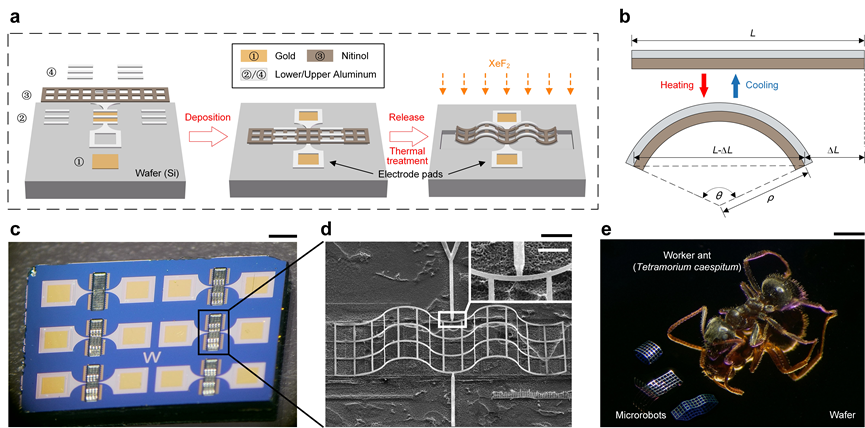
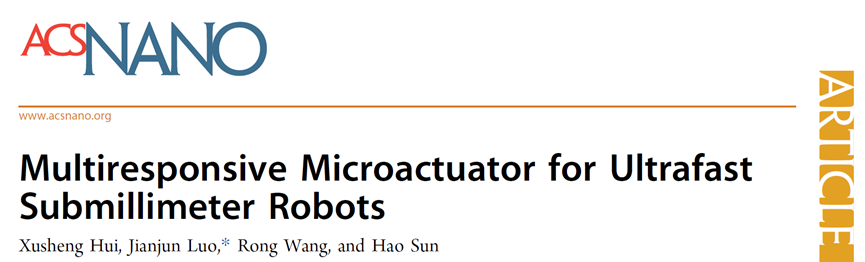
图1设计方案和原理样机。 (a) 微执行器结构示意图。(b) 双晶片薄膜弯曲示意图。(c)一块硅片切片(1.5cm×0.5cm)上的六个微执行器样机。(d)微执行器的SEM照片。内部插图表示执行器和驱动电极之间“弱链接点”。(e)微型机器人原理样机和蚂蚁的尺寸比较。图中各比例尺:(c) 1mm, (d) 200 μm,插图50 μm, (e) 1mm。
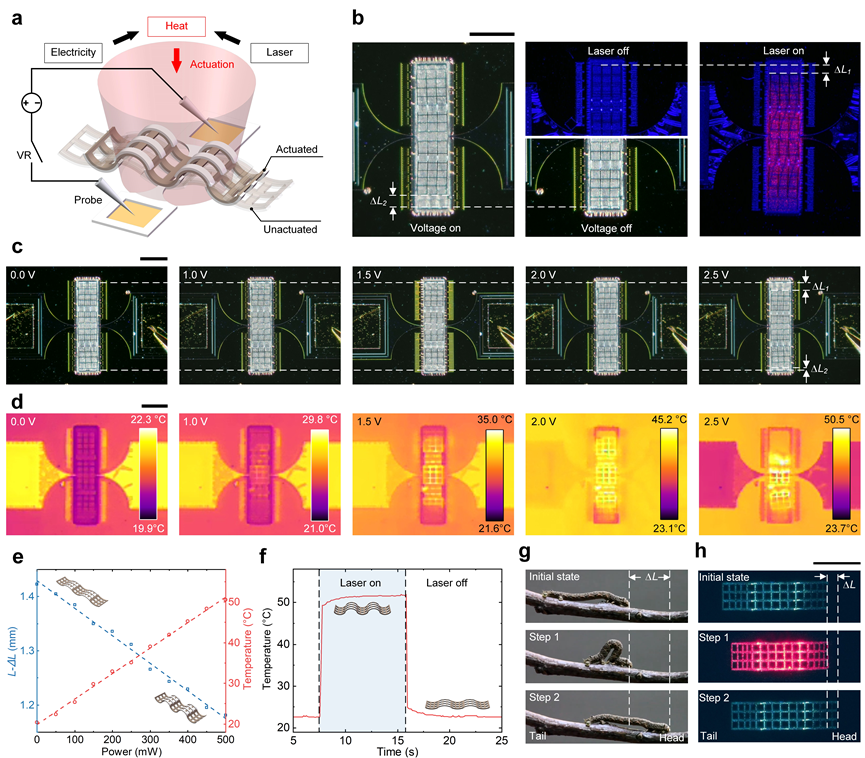
图2原位驱动测试结果。(a)微执行器电热驱动和光热驱动机理示意图。(b)微驱动器的初始状态(中间)和施加电压(左)和激光后的收缩变形(右)。(c)在0.0 ~ 2.5 V直流电压下微执行器的稳态响应。(d)在0.0到2.5 V的直流电压下微执行器温度红外热成像图。(e)原位测试下微执行器的长度-温度-激光功率图。(f)激光开关后微执行器的实时温度变化。(g)尺蠖在自然界的爬行运动。(h)微机器人的尺蠖式运动。比例尺:500 μm。
如图2所示,微执行器在低压电信号和激光刺激下展示出了良好的线性响应行为。得益于所采用的高质量纳米薄膜所具有的极高的表面积-体积比,微执行器具有超快的散热速度,响应速度都可达100Hz。受自然界中尺蠖运动方式的启发,团队将微执行器从图1所示的弱连接点处断开驱动电极,完全自由后的微执行器可转化为仿生尺蠖运动的微型机器人。
图3不同3D构型的微型机器人。(a)微型机器人05U33S。(b)微型机器人05U33L。(c)微型机器人02U58SL。(d)微型机器人01U58L。比例尺:500 μm。
团队所采用的设计和制造方法允许多种不同构型的微执行器及微型机器人同时并行化和批量化生产制造。只需改变结构中各层纳米薄膜的平面轮廓,即可编程结构释放后的三维构型。各类具有不同构型的微型机器人,在运动特性方面表现出了各异性。
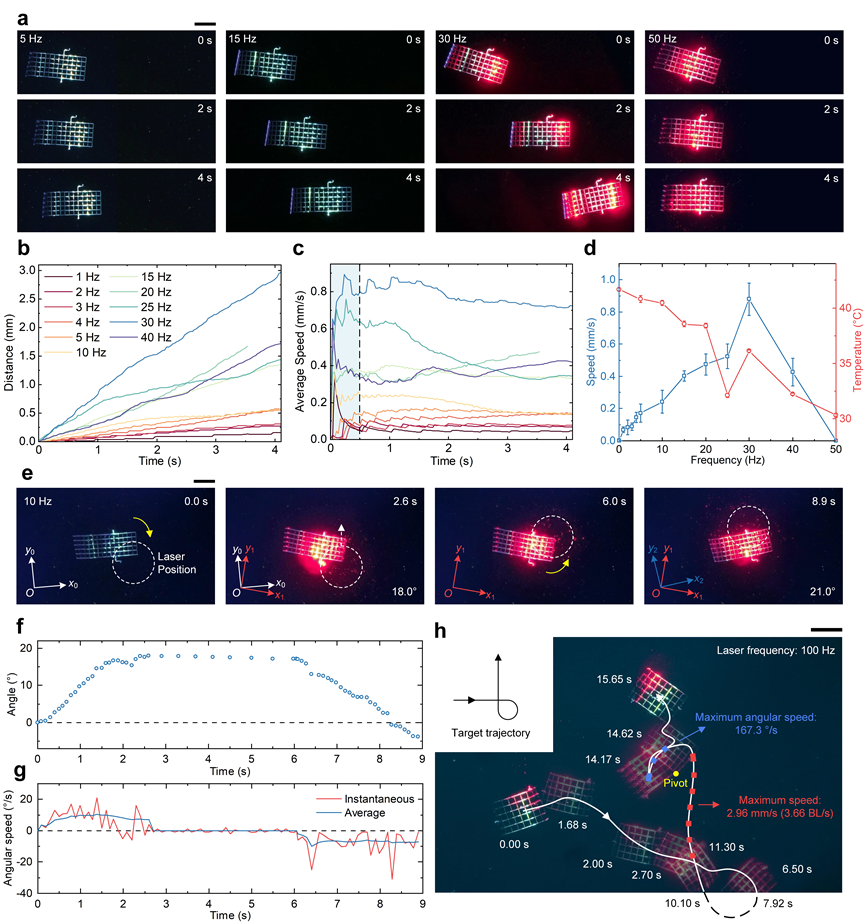
图4微型机器人直行和转向运动测试结果。(a)微机器人02U58SL在5、15、30、50 Hz激光频率下移动速度比较。(b)不同激光频率下机器人移动距离。(c)不同激光频率下机器人平均速度 (d)微机器人02U58SL的速度-温度-激光频率曲线图。(e)机器人连续顺时针和逆时针旋转。(f)机器人的方向相对于其初始位置的角度变化。(g)微型机器人瞬时角速度和平均角速度。(h) 01U58L机器人沿目标轨迹的受控运动。比例尺:500 μm。
微型机器人的运动速度可通过激光频率进行控制,在硅片抛光面上的爬行速度最高可达2.96mm/s (3.66BL/s),达到国际领先水平。机器人运动方向可通过激光在机器人结构中的照射部位进行控制,旋转速度最高可达167.3°/s。
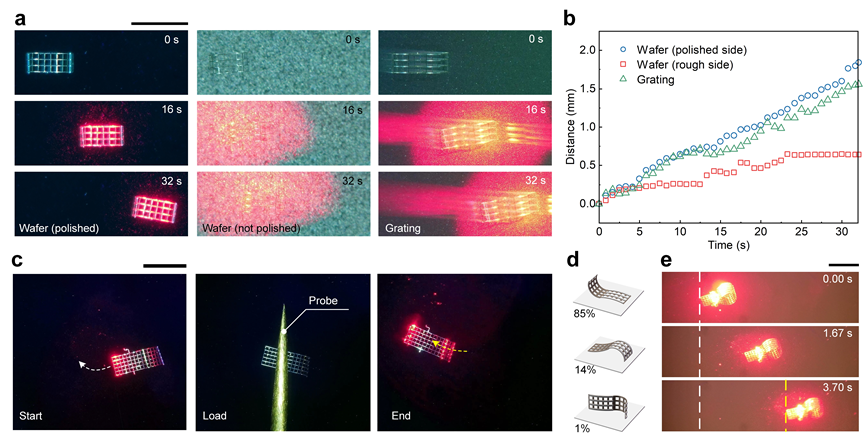
图5微型机器人适应性和鲁棒性测试结果。(a)微型机器人在不同基底上的移动速度比较,包括硅片抛光面、硅片未抛光面和光栅。(b) 微型机器人在不同基底上移动距离变化。(c)微型机器人在被50毫克的探针挤压后仍能继续工作,该探针的载荷约为其自身重量的67000倍。(d) 微型器人自由落体后三种落地姿态的定义和统计结果。(e)微型机器人02U58SL以翻转状态进行运动。比例尺:1mm。
微型机器人能够在多种具有不同粗糙度的运动基底进行可靠运动,具有极强的运动适应性。微型机器人由于具有薄膜结构特征和对称性3D结构设计,因此具有极强的鲁棒性,对于复杂环境中的风险和意外情况表现出了优异的故障安全和容错行为。微型机器人能够在重量是其67000倍的探针挤压后恢复形状并继续运动,还能够在结构完全翻转的状态下以接近正常状态的速度进行运动。上述特性能够保证微型机器人在面临意外冲击和姿态干扰的情况下保持其驱动特性和运动功能,具有极强的鲁棒性。
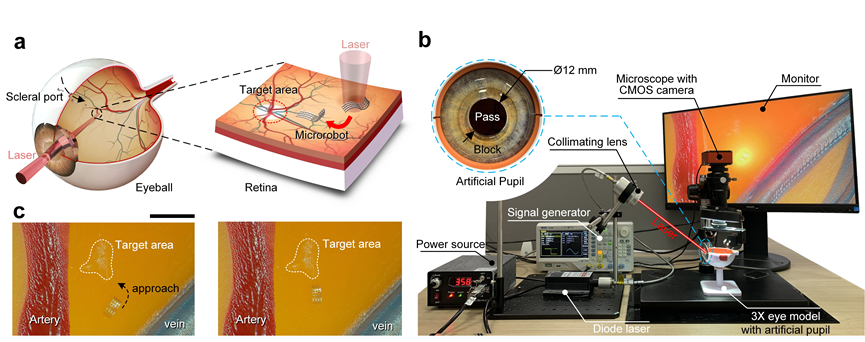
图6微型机器人应用场景演示。(a)微型机器人在激光驱动下进行视网膜手术的概念示意图。(b) 3倍人眼模型中微机器人受限驱动的实验设置。(c)微机器人在受限驱动下寻址并接近目标区域。比例尺:1mm。
论文进一步构建了微型机器人进行眼科手术的概念系统,并在3X人眼模型中初步演示了微型机器人在受限驱动条件下的被动障碍跨越机制和驱动运动
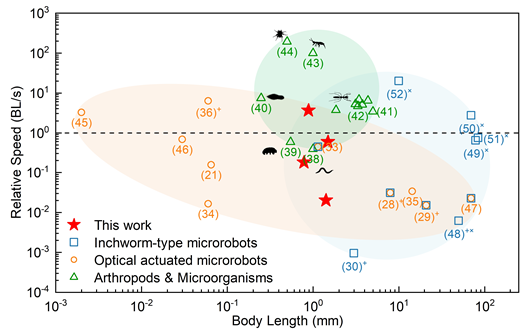
图7与相关前沿工作的结果对比。以机器人体长为横轴,相对速度为纵轴比较运动性能。标记为“+”的文献表示需要在特制棘齿表面才能运动的机器人。标注“×”的文献表示该机器人需有线供电。
本文所研制的微型机器人相比于现有光驱动及尺蠖式运动机器人具有尺寸小、运动速度快的明显优势,其相对速度赶超部分蚁族。该研究为微观尺度下构建可精确控制、快速响应的高精度三维微执行器,以及可高速可控运动、具有强适应性和强鲁棒性的微型机器人提供了新的思路和策略。所研制的微型机器人有望在航空航天精密维修、隐蔽侦察、环境监测、介入医疗等领域发挥重要的应用价值。
以上文章转载微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
