皮层电图(ECoG)系统是一类表面电极植入物,用于研究大脑大面积的神经活动。ECoG在基础神经科学和临床中有着广泛的应用,包括脑功能监测、减轻癫痫发作、脑功能恢复、疼痛调节、语音识别和脑机接口。ECoG网格的大面积覆盖在研究与大脑几个区域相关的神经系统疾病方面尤其有用,例如创伤性脑损伤后的扩散。然而,当在大脑皮层上植入具有大表面积的网格时,存在着巨大挑战。
传统的研究和临床ECoG网格是机械被动设备,在开颅手术暴露大脑后,通过手术将其放置在皮层上。开颅手术的大小至少与ECoG网格的一样大。神经记录通常在手术中或患者留在医院的短时间内进行。考虑到风险收益比和患者对手术的可接受性,大型开颅手术通常是使用ECoG网格的限制因素。因为大型开颅手术多伴随着术后并发症,包括炎症反应和疤痕、大脑形态学变化和神经系统缺陷。这种平面ECoG网格的一种替代方案是通过颅骨中的微创窗口(<1 cm2)植入的立体定向脑电图探头,从而具有比ECoG更低的风险特征。
近日,瑞士洛桑联邦理工学院Neuro-X研究所的Stéphanie P Lacour教授领其团队在Science Robotics上发表了一种形似章鱼的,使用外翻驱动作为大表面积电极部署机制的软机器人皮质电图(ECoG)系统。Lacour教授是生物电子界面领域研究的专家、洛桑联邦理工学院神经假肢中心共同创始成员和现任主任,在此领域做出了很多杰出的工作。
该系统内置应变传感器,可实时监控颅骨下软植入物的部署。具有亲水内表面的微弹性套筒允许通过加压分配生物相容性润滑剂来控制外翻,进而实现完全柔软的薄壁ECoG系统与大脑表面的紧密接触。最后,通过对小型猪模型的外翻、部署传感和急性神经记录,展示了所提出的ECoG系统的全部功能与临床应用潜力。
软ECoG系统的设计与制造:
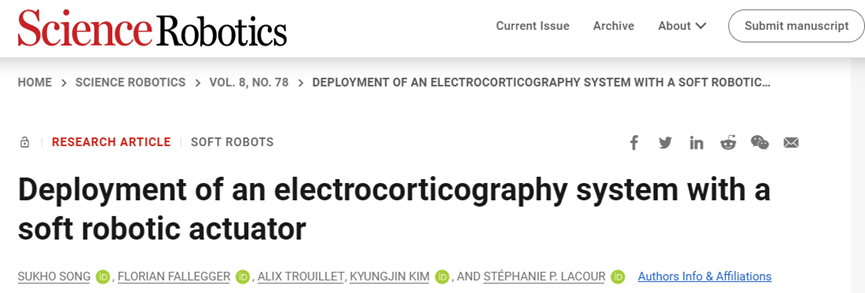
使用微加工工艺将外翻机制、应变传感器和神经电极组合成一个可展开的 ECoG 系统(下图A)。植入物的内表面被处理为亲水性,可使用生物相容性水性流体进行润滑,以减少折叠和展开过程中软ECoG系统内部的层摩擦。该系统包含六个致动支腿,每个支腿包含四个互连的微电极,被可展开外轮廓上的应变传感器所包围。电极部位涂有铂(Pt)-PDMS复合材料,该复合材料与神经组织建立亲密接触,以支持低电阻抗和机械顺应性。
将ECoG支腿折叠到直径20 mm的装载机中,与典型的20 mm颅骨窗相匹配。装载机内部施加正流体压差,增加外翻尖端处的流体力。当流体力大于摩擦力时,折叠的阵列通过翻转轻轻地从尖端推出,并在坚硬的颅骨下延伸。随着外翻产生新的体积流体压差下降,当流体压力小于摩擦时,尖端停止延伸。在部署期间,通常每条腿持续30到40 s,膨胀的腿可能会稍微推动大脑。一旦系统完全部署并减压,可部署的ECoG网格具有高顺应性和允许与大脑表面紧密接触。在ECoG监测之后,部署的网格可以很容易地从大脑中拉出。
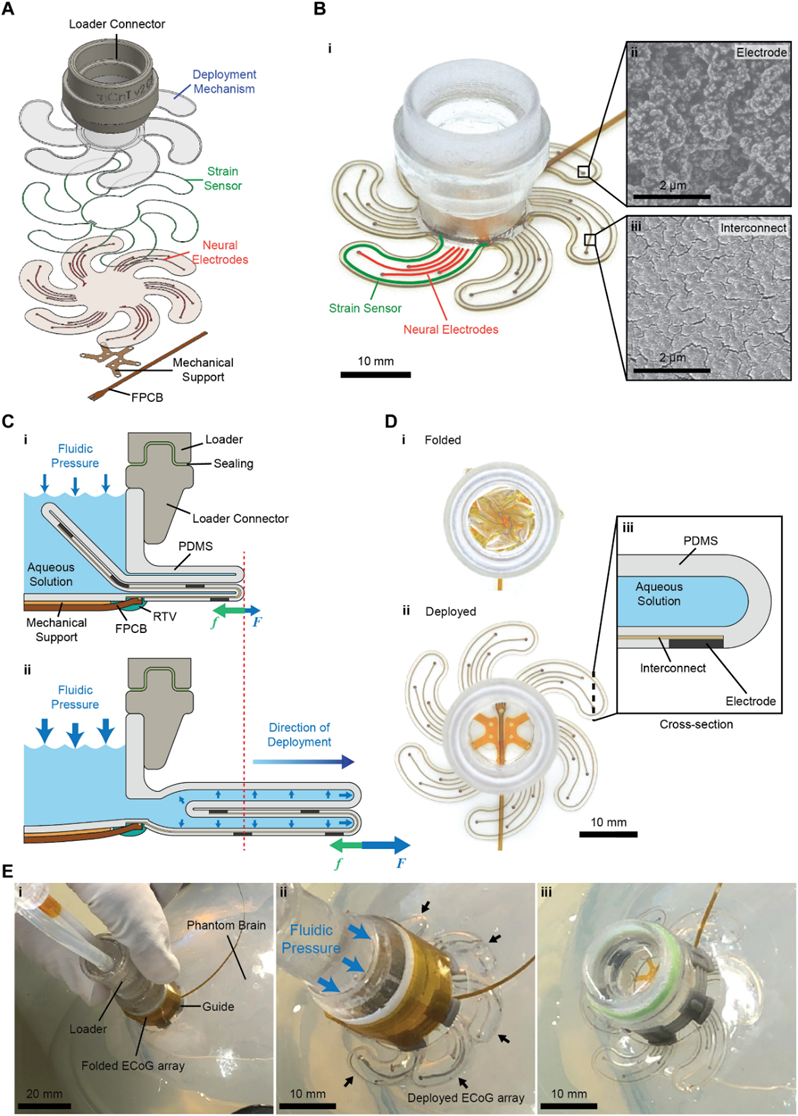
图 可部署ECoG系统的设计、制造和工作原理
软ECoG系统的结构表征:
在硬膜下皮质间隙内实施压力驱动的外翻,这势必需要对底层脑组织进行压迫。首先研究可展开腿的形状和几何参数,即直单腿上的腿宽w和厚度h,锥形腿上的锥角a和曲率半径rc。定义部署压力为Pd。一方面,Pd随着腿宽变窄和厚度增加而升高。另一方面,锥角(曲率)对Pd和腿部可展开性。增加腿的曲率特别令人感兴趣,因为可以达到更大的表面覆盖率。无论 rc范围从 6 到 30 mm,Pd几乎保持不变,平均为 10.4 kPa,显示 rc对Pd无实质性影响。
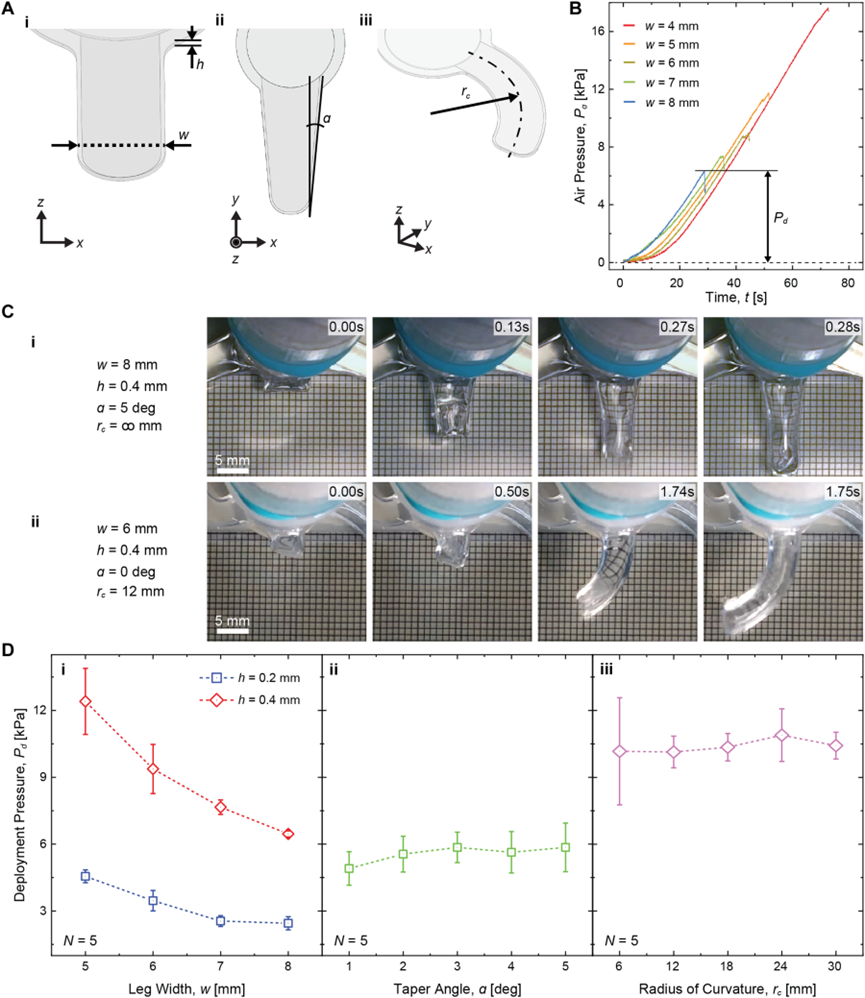
图 ECoG 支腿的可部署性
可展开腿参数对脑部压迫影响:
加压后,每条腿由于其矩形松弛形状而充气为椭圆形横截面,这种膨胀可能会局部和暂时压缩潜在的大脑。为了量化腿部加压后的最终脑压迫,使用软水凝胶脑模型与刚性塑料框架设计了大脑和颅骨的模拟系统。大脑和颅骨模型相距1 mm,为硬膜外腔。凝胶涂有随机分散的石墨烯纳米片,以进行位移跟踪。将系统插入间隙并加压至Pd,软腿的横截面从扁平变为椭圆形,从而压缩水凝胶脑模型。由此产生的石墨烯纳米片的密度在充气腿附近增加。
图3C显示了不同腿宽(5 mm<w<8 mm)下,沿z轴(x=y=0)的di作为水凝胶深度z的函数。凝胶位移di在腿的中心轴正下方达到最大di=dmax(x=y=z=0),并且在约6mm的深度处稳定在约0.6mm,与腿的宽度无关。较宽的支腿导致下层凝胶的整体位移较大(当w=5至8 mm宽时,dmax=1.7至2.5 mm),尽管其斜率随着有限元模型预测的支腿宽度的增加而变小。这可以解释为较宽的腿能够以较小的Pd展开,从而在脑模型上引起较低的压迫,实验和模拟结果非常一致。
通过验证的模型,估计设备厚度的减少对皮层压痕的影响。0.2 mm厚的腿部dmax(虚线)显示出比0.4 mm厚的腿部dmax(虚线)平均少约0.6 mm压痕。dmax的下降归因于较细的腿的迅速外翻。但是在实际应用场景中,会存在润滑不良、大脑和颅骨之间的间隙减小、硬膜外植入时颅骨和硬脑膜之间的粘连或颅骨的高曲率等因素,导致实际Pd增加。
图 脑部压迫取决于可展开的 ECoG 腿相关参数
软ECoG系统体内概念验证:
接下来,研究体内可部署的ECoG系统在迷你猪模型中敏锐地记录皮质大脑活动的潜力。设计考虑将皮层上的压痕限制在小至2 mm,这个维度被证明是人脑手术的安全极限。进而确认了一种植入式软ECoG原型,其直单腿宽度为6 mm,厚度为0.4 mm,长度为15 mm,以满足上述设计标准,估计的压痕深度约为3 mm,部署压力最低。
可部署的系统支持带有金属互连的三乘四电极阵列和应变传感器。应变传感器包围阵列,允许实时监控支腿展开的状态。初始电阻Ro应变传感器(扁平形式)约为10千欧姆,折叠时增加到几兆欧。在部署期间电阻保持在兆欧范围内,一旦阵列平坦后电阻即恢复初始低值。虽然电阻前后有两个数量级的差异,但经过50次重复折叠和展开循环后仍然保持性能稳定。折叠和展开对电极位点阻抗的影响也很小,证实了它们对极端变形的鲁棒性。使用不可压缩流体介质诱导展开,虽然会导致展开速度变慢,但是防止了气动能量的积聚,避免了快速和不受控制的部署。
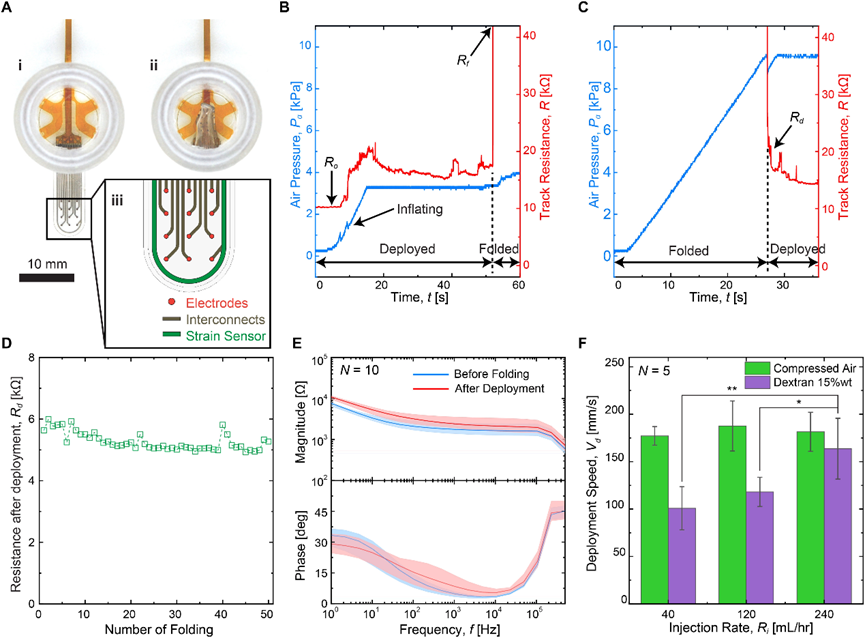
图 软ECoG系统的功能验证
软ECoG系统的体内验证:
在哥廷根迷你猪模型中证明软ECoG系统的体内部署和记录能力。该模型的颅部结构的血管密度和颅骨厚度与人类相似。记录大脑表面响应鼻子电刺激的体感诱发电位(SSEP)。软ECoG系统在皮层表面硬膜下部署,靶向额叶和躯体感觉区域。软植入物的尺寸支持从颅骨上部展开,因此不需要在中央窦静脉上方进行开颅手术。在硬膜切开术后,将装载机放置在大脑表面。该装置的底部与皮层接触,在开颅术的前缘,折叠的腿向前部展开。应变传感器输出指示软腿完全展开时移除装载机,并将植入物连接到电生理学记录系统。
记录在鼻子的三个不同位置与两个刺激幅度,进行电刺激和引起的体感皮层诱发电位。来自选定通道的平均信号呈现去极化和极化峰值,其时间与SSEP先前报告的时间相似。振幅峰值>30 μV的SSEP显示出特定位置的振幅和波形特征。尸检证实了部署的阵列在体感区域上的位置。软植入物没有任何折叠部分,并且与皮质表面很好地吻合,部署位置下方或附近没有明显的损伤。以进一步分析炎症和神经元健康。使用小胶质细胞、星形胶质细胞和神经元的三种标记物对冠状切片进行染色,植入区内外没有可见损伤,大脑也没有凹陷,这表明基于外翻的部署对大脑组织来说是柔软温和的。在基底附近注意到零星的小胶质细胞激活,但在可展开腿尖端没有。此外,神经元成像显示了完整的皮层。尽管多种因素可能导致上述损伤,但这一结果表明,对当前设计的微小修改,如更细或更窄的腿,可能足以确保植入大脑在微观水平上的安全。这些是急性试验(N=1)的初步观察结果,需要在更多的动物和更长的时间点上进行巩固。
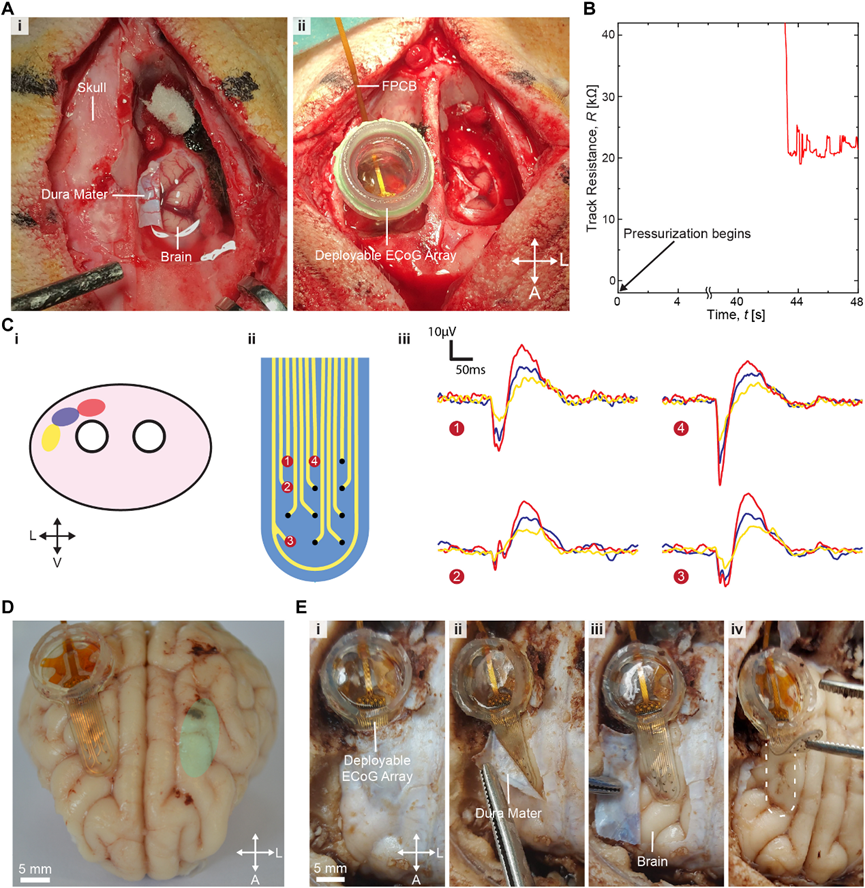
表 在迷你猪模型中对SSEP进行记录
小结:
传统的ECoG系统是一种被动设备,广泛与开颅术结合使用,这些开颅术通常将皮层暴露到与神经接口大小一样大的区域上。各种不良反应可能与大颅切开术有关,包括感染风险高,可能的脑损伤和剩余大疤痕的美学障碍。这些风险极大地限制了ECoG阵列用于大规模功能性脑图或用于脑机接口的永久性皮质植入物的应用。
为了减轻这些影响,最近探索了ECoG阵列的微创部署方法。大脑是身体最柔软的器官,插入多余结构可能导致神经元网络活动和整体大脑功能的灾难性后果。心动周期和呼吸期间动脉血压的周期性变化也带动着大脑的持续运动,这进一步要求柔软的仿生设计不会引发不良免疫反应和组织损伤。在这项工作中,作者团队利用软机器人和软生物电子设备提出了一种植入式系统,该系统可以满足与安全性,皮层覆盖和电生理传感相关的临床需求。基于流体的外翻可以产生足够的驱动力,将植入物部署在硬膜下间隙。折叠的系统从位于颅骨外部装载机通过微颅窗送入。因此,更大的表面积的展开电极只需要更大的装载器,而不会增加开颅术的大小或大脑的压迫深度。
通过结合软机器人驱动、本体感受传感和软生物电子神经技术,设计一种可植入的软机器人神经接口,用于具有大面积电极阵列的微创植入。迷你猪SSEP的体内脑记录显示出典型的局部场电位,其振幅和时间与以前的报告相当。然而,组织化学分析中显示的局部微观损伤要求进一步优化部署系统的生物安全性。重复这些初步发现,将进一步评估外科手术以及可部署系统作为慢性神经技术的适用性。
结合软机器人和软生物电子学的概念可以带来神经技术以外的更多应用,因为可展开腿和电极可以适应特定的几何形状和目标器官。例如,在心脏上部署可能允许心外膜映射电活动以诊断心房颤动,比目前基于导管的解决方案具有更大的覆盖范围和精度。此外,通过小开口部署大电极阵列的能力可以在腹腔镜手术中用于映射肠,肾或肝电活动。软机器人神经接口为开发患者可访问和微创表面的植入物开辟了新途径。软CoG系统的安全性和可用性的提高,可能会使其在治疗各种神经系统疾病中找到广泛的应用场景。
以上文章转载于微信公众号奇物论,如有侵权,请及时联系我们修改或进行删除。
