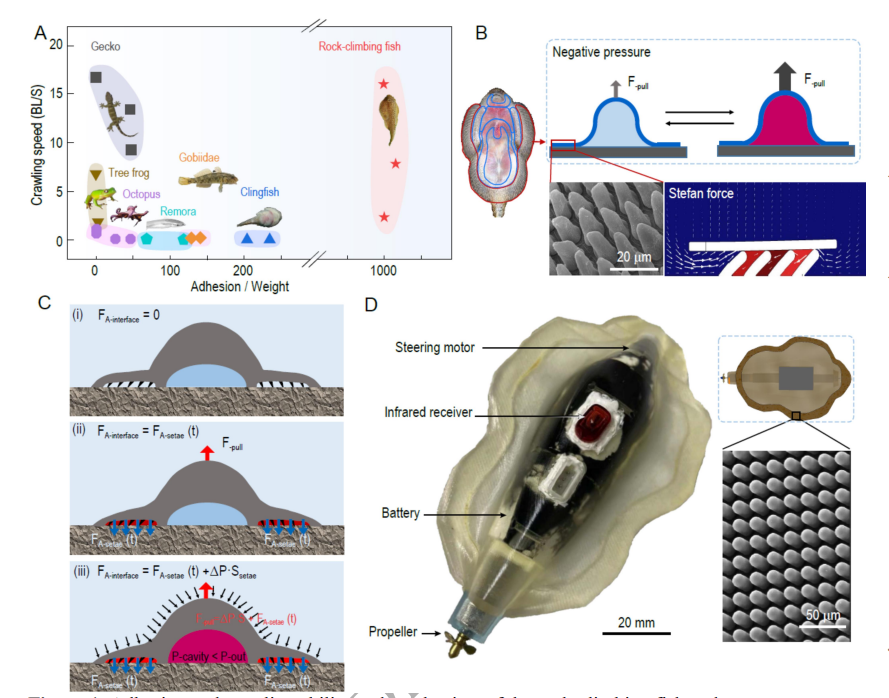
攀岩鱼(Beaufortia Kweichowensis)独特的动态适应黏附能力的潜在原理在公开文献中仍然是一个谜,它可以抵抗1000倍于其重量的拉力,同时实现快速滑动(每秒7.83个身体长度)。长期以来,水下机器人一直在寻找这种粘着滑动的能力。然而,由于需要较高的表面接触应力,强表面附着力和快速滑动似乎是相互矛盾的。
近日,中国科学院沈阳自动化研究所Lianqing Liu,Chuang Zhang揭示了攀岩鱼表面紧贴和快速滑动的巧妙平衡机制。
文章要点
1)研究发现,小刚毛在胸鳍和腹鳍上产生的Stefan力(0.1mN/mm2)通过将鱼的整个身体贴合到一个表面形成密封室而产生70N/m2的粘附力。由于气室体积变化产生的负压,拉力将同时被中和。攀岩鱼类的微型刚毛流体动力相互作用和密封吸盘结合在一起,有助于低摩擦和高拉力阻力,因此可以在附着在表面时快速滑动。
2)受这一独特机构的启发,开发了一种水下机器人,其结构模仿攀岩鱼的功能,通过制造微型刚毛阵列并将其连接到柔软的自适应舱中,在平衡水下密封性、附着力和快速滑动方面显示出与传统机器人类似的优势。
参考文献
Wenjun Tan et al, Uncover rock-climbing fish’s secret of balancing tight adhesion and fast sliding for bioinspired robots, NSR, 2023
DOI: 10.1093/nsr/nwad183/7210556
以上文章转载于微信公众号奇物论,如有侵权,请及时联系我们修改或进行删除。
信息发布人: Lianqing Liu,Chuang Zhang
发布单位: 中国科学院沈阳自动化研究所
信息源: https://academic.oup.com/nsr/advancearticle/doi/10.1093/nsr/nwad183/7210556
