大自然为单细胞生物应对复杂环境和生存任务演化了一种成功的进化方向——伪足。变形虫是一种单细胞原生动物,通过控制原生质的定向流动,可以再任意方向产生伪足,以执行环境感知、运动、捕食和排泄等生命活动。然而,创建具有伪足的微型机器人系统,以获取变形虫的环境适应和任务作业能力,仍具有很大的挑战。
鉴于此,哈尔滨工业大学李天龙团队、郑州大学张伟伟团队提出了一种利用磁性液滴构建阿米巴机器人的磁驱操控策略(图1),并结合仿真解析了伪足的生成及运动机制。该机器人可以在单伪足、双伪足和运动模式间自由切换,并复现了变形虫伪足的伸缩、弯曲、捕捉和运动等操作(图2)。伪足赋予了机器人卓越的机动性,包括跨越复杂三维地形以及液相中悬浮游动等(图3)。此外,受“毒液”的启发,他们还研究了阿米巴机器人的吞噬和寄生行为,并探索了其在试剂分析、微化学反应、结石清除和药物溶栓等场景的应用潜力(图4、5、6)。
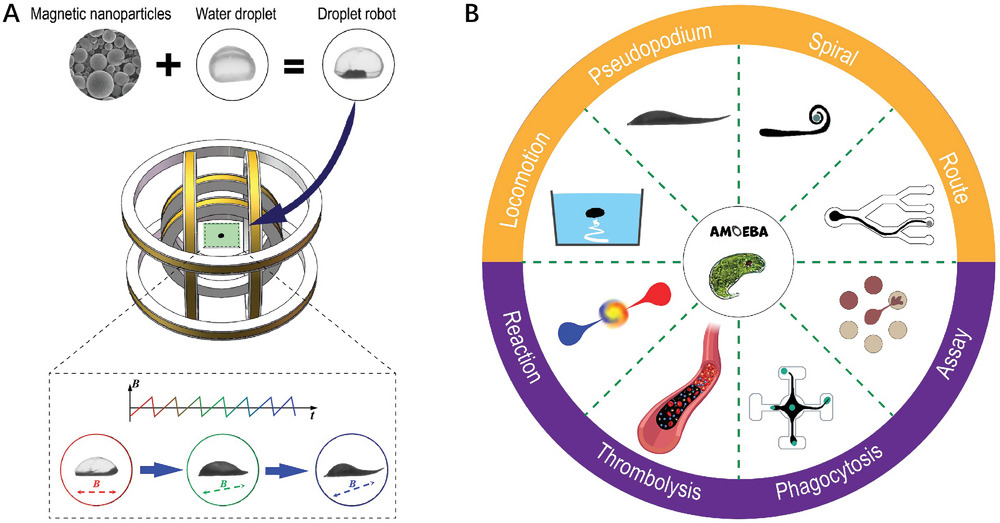
图 1 机器人的编程策略和应用
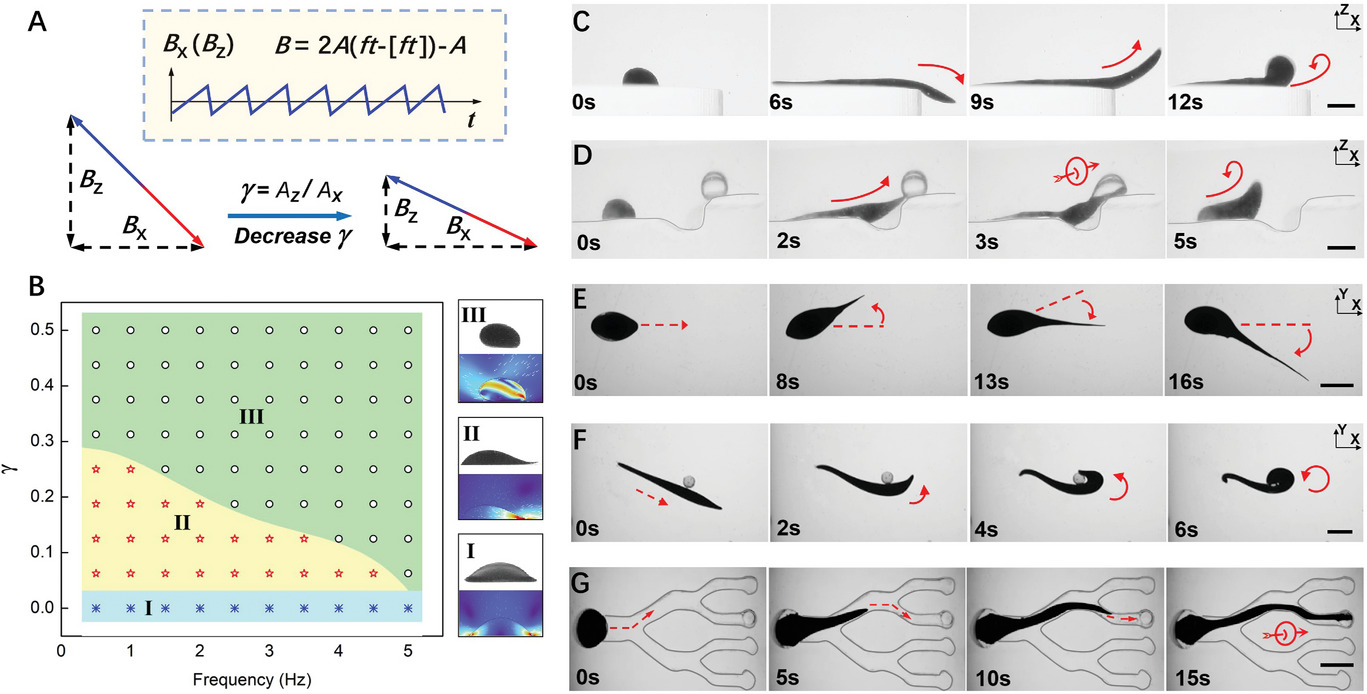
图 2 伪足的特征
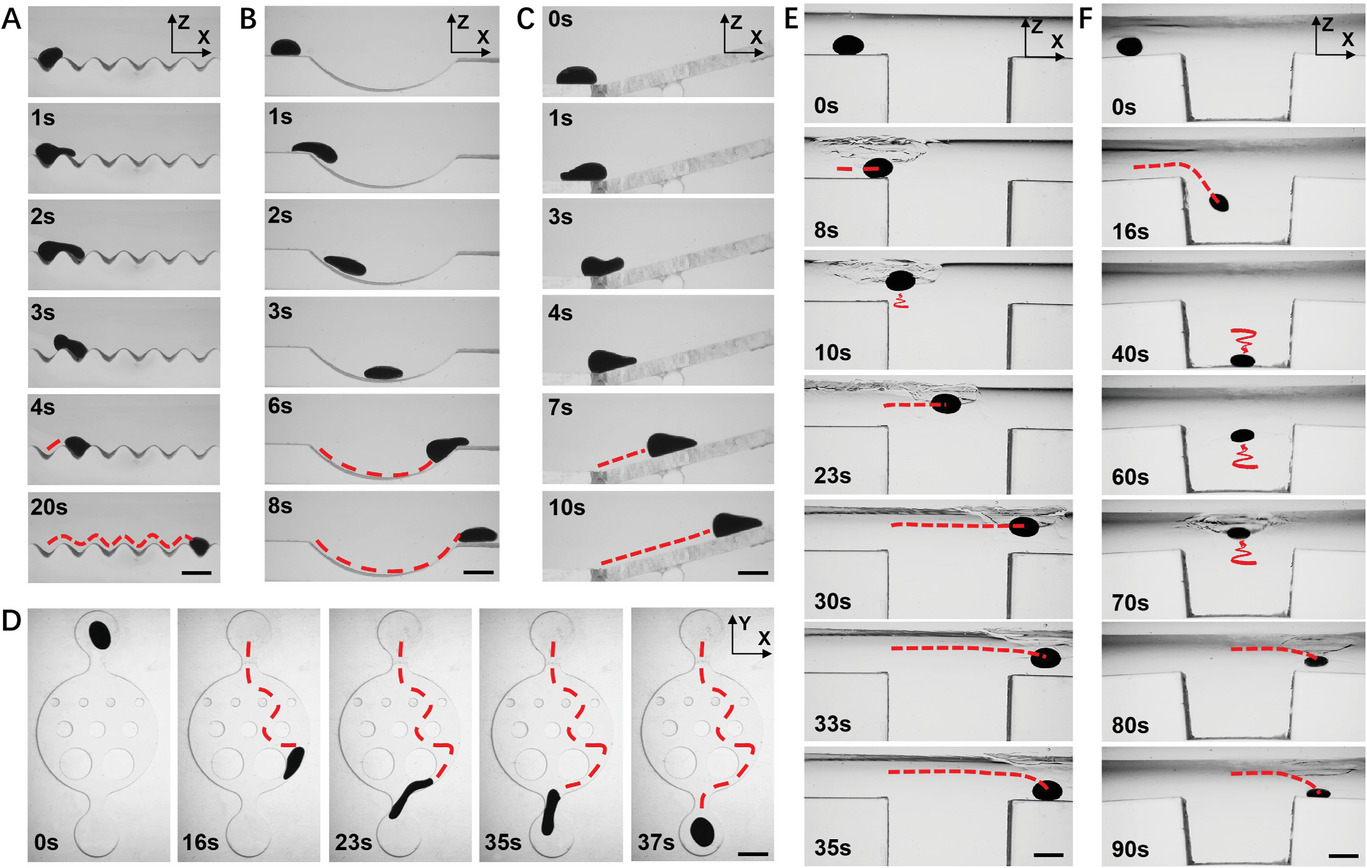
图 3 机器人的运动能力
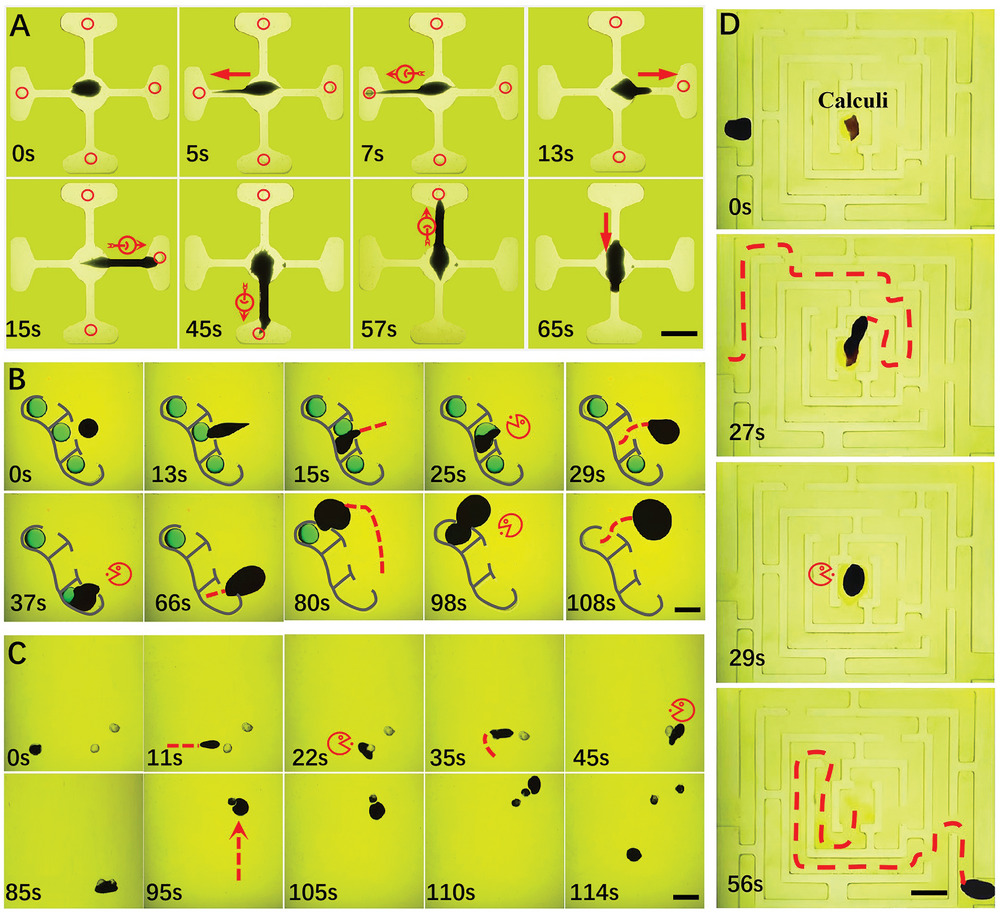
图 4 机器人的吞噬能力
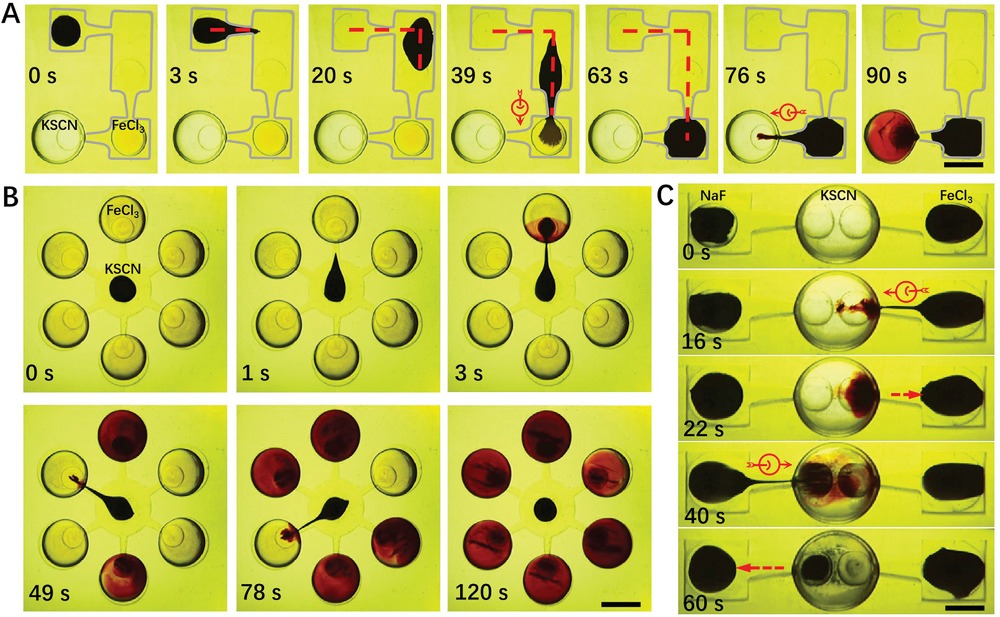
图 5 机器人的寄生能力和化学应用
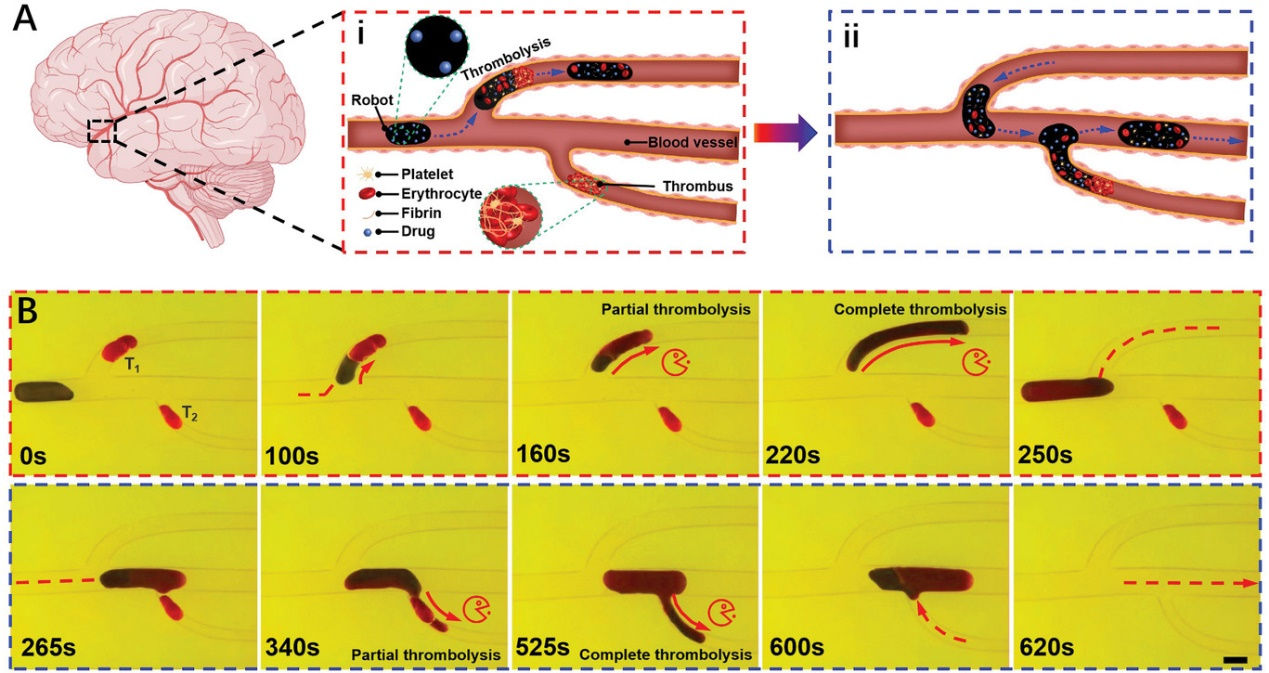
图 6 使用毒液机器人进行药物溶栓
该研究不仅有助于理解单细胞生命的基本原理,而且在芯片实验室、微化学反应以及生物医学领域具有广阔的应用前景。该工作以“Amoeba-Inspired Magnetic Venom Microrobot”为题发表在《Small》。文章第一作者是郑州大学张伟伟讲师,哈尔滨工业大学李天龙教授和郑州大学张伟伟讲师为论文的共同通讯作者。
信息发布人: 李天龙团队、张伟伟团队
发布单位: 哈尔滨工业大学、郑州大学
信息源: https://onlinelibrary.wiley.com/doi/10.1002/smll.202207360
