近期,南京航空航天大学吉爱红、郑祥明研究员提出了一种全新的姿态转换控制策略,通过模拟昆虫在壁面的着落与起飞运动机制,可以使拥有飞行与爬行能力的仿生机器人完成流畅的在垂直壁面着落、沿壁面爬行和从壁面起飞的连贯动作,相关成果以 “An Aerial–Wall Robotic Insect That Can Land, Climb, and Take Off from Vertical Surfaces” 为题发表在Research上。


自然界的昆虫除了具有令人惊叹的扑翼飞行技巧,还能够飞到多种材质的壁面上附着并爬行,其扑翼飞行、壁面爬行以及两种运动模式间自如转换的运动能力,给我们提供了极好的仿生模型,而现有的仿生机器人很少能同时兼具这两种运动能力。
设计具有类似昆虫扑翼特性的飞行动力系统,根据昆虫的爬壁特征及昆虫在壁面上的着落与起飞行为特性设计爬行动力系统及飞爬转换控制策略,并应用于仿生飞爬两栖机器人,仍是个相当有挑战的课题。这主要是因为目前能悬停的扑翼飞行系统在一定程度上还难以产生足够的升力支撑作为负载的爬壁机器人,并且能够在多种类型表面附着爬行的爬壁机器人的研究还不够全面。
此外,能够穿梭于空中与壁面间的机器人属于具有多模态运动能力的跨域机器人领域,可以通过切换运动模式在不同环境间自由移动。空壁两栖机器人需要切换在空中与壁面的运动模式,这种面向垂直壁面的飞爬转换控制方法仍有待研究,以设计能够有效仿生自然界昆虫在壁面着落与起飞的运动模式,提升两栖机器昆虫的整体运动性能。
南京航空航天大学吉爱红、郑祥明研究员展示了一种能在垂直壁面着落、爬行和起飞的空-壁两栖机器昆虫。机器昆虫成功地演示了在多种复杂竖直壁面的着落、爬行与起飞(包括玻璃、木门、大理石、树干、弹性布面、石灰墙和铁皮表面,图1),这一特性在自然界中很常见,比如苍蝇从远处飞来停在墙上爬到舒适的地方栖息后,飞到下一个地方,这些结果对理解昆虫的起飞和着落具有重要意义。

图1 两栖机器昆虫在各种竖直壁面上的着落-爬行-起飞
首先,机器昆虫采用扑翼旋翼混合动力布局,既可以实现在空中高效可控的飞行,又可以通过旋翼动力部分的气动负压吸附与具有仿生粘附特性的爬行机构的协同作用,实现在竖直壁面的附着与爬行。其中,头尾旋翼动力组差速旋转产生俯仰力矩,为机器昆虫提供俯仰运动和纵向运动的操控;左右扑翼动力组差速扑动产生滚转力矩,为机器昆虫提供滚转运动和横向运动的操控;矢量偏转舵机驱动头部旋翼动力组偏转,产生航向偏转力矩,为机器昆虫提供偏航运动的操控(图2)。
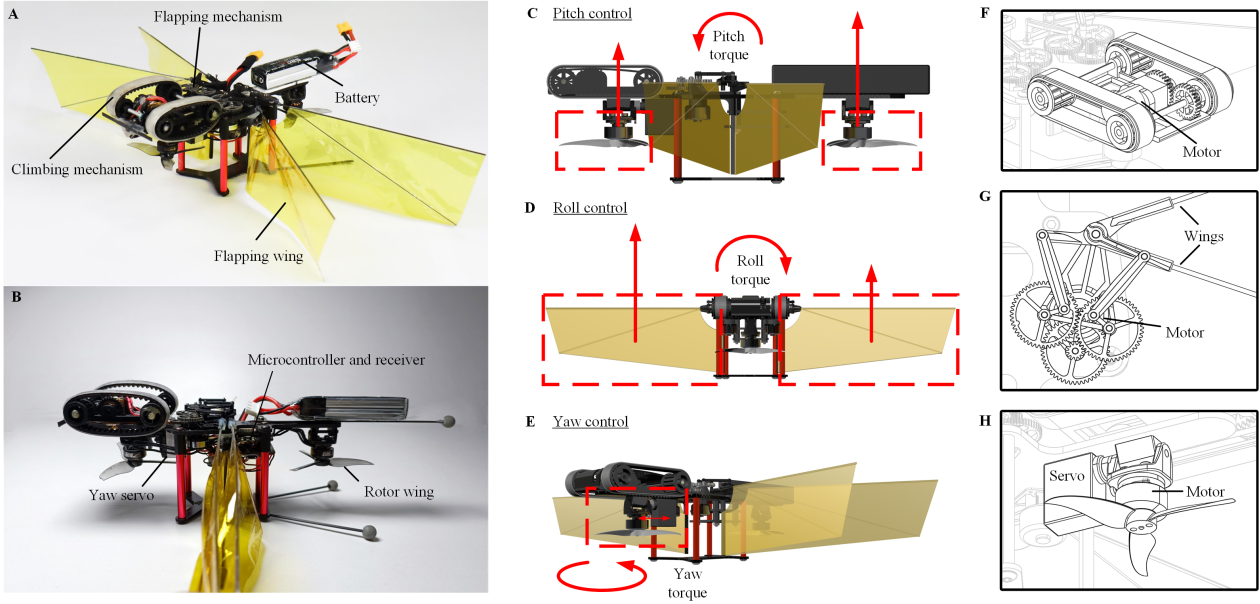
图2 机器昆虫总体结构的细节展示
其次,纵轴旋翼动力的布局设计和控制策略实现了飞爬转换时独特的跨域运动能力,控制算法基于Ardupilot固件,通过IMU测得机器人的姿态数据,其中估计角速度经处理后直接发送到姿态控制器,估计姿态角以四元数的形式发送到扩展卡尔曼滤波算法(EKF2)进行数据融合处理,并以欧拉角的形式输入到角度环中(图3)。
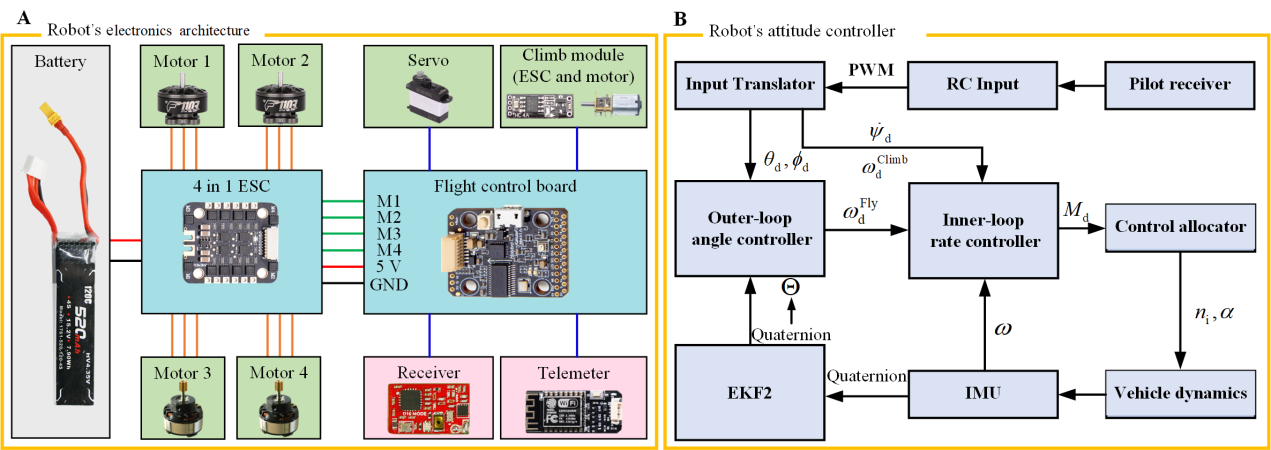
图3 机器昆虫的控制结构
再次,对机器昆虫飞行与爬行的运动学与动力学进行分析,得到飞行动力部分执行器的力与力矩,由三个欧拉角确定机器人飞行时的姿态,与机器人各个方向的旋转角速率相关,并分析了机器人运动过程中容易失稳的形式以确定旋翼负压系统的吸附力与重力、壁面摩擦系数等参数的关系(图4)。

图4 空-壁两栖机器昆虫的运动学和动力学模型
随后,作者展开机器昆虫的扑翼旋翼混合动力性能实验,在给定控制输入信号后将其控制能力进行比较,验证了机器昆虫可以提供足够的控制力和力矩,旋翼与扑翼混合动力同时启动时,净垂直推力与油门指令保持近似的线性关系,并且在复合控制信号下,扑翼旋翼混合动力控制的三轴力矩输入输出互不干涉,力矩大小满足操纵需求,控制分配逻辑合理,为两栖机器昆虫的飞-爬-飞转换研究提供可靠的飞行平台依据(图5)。
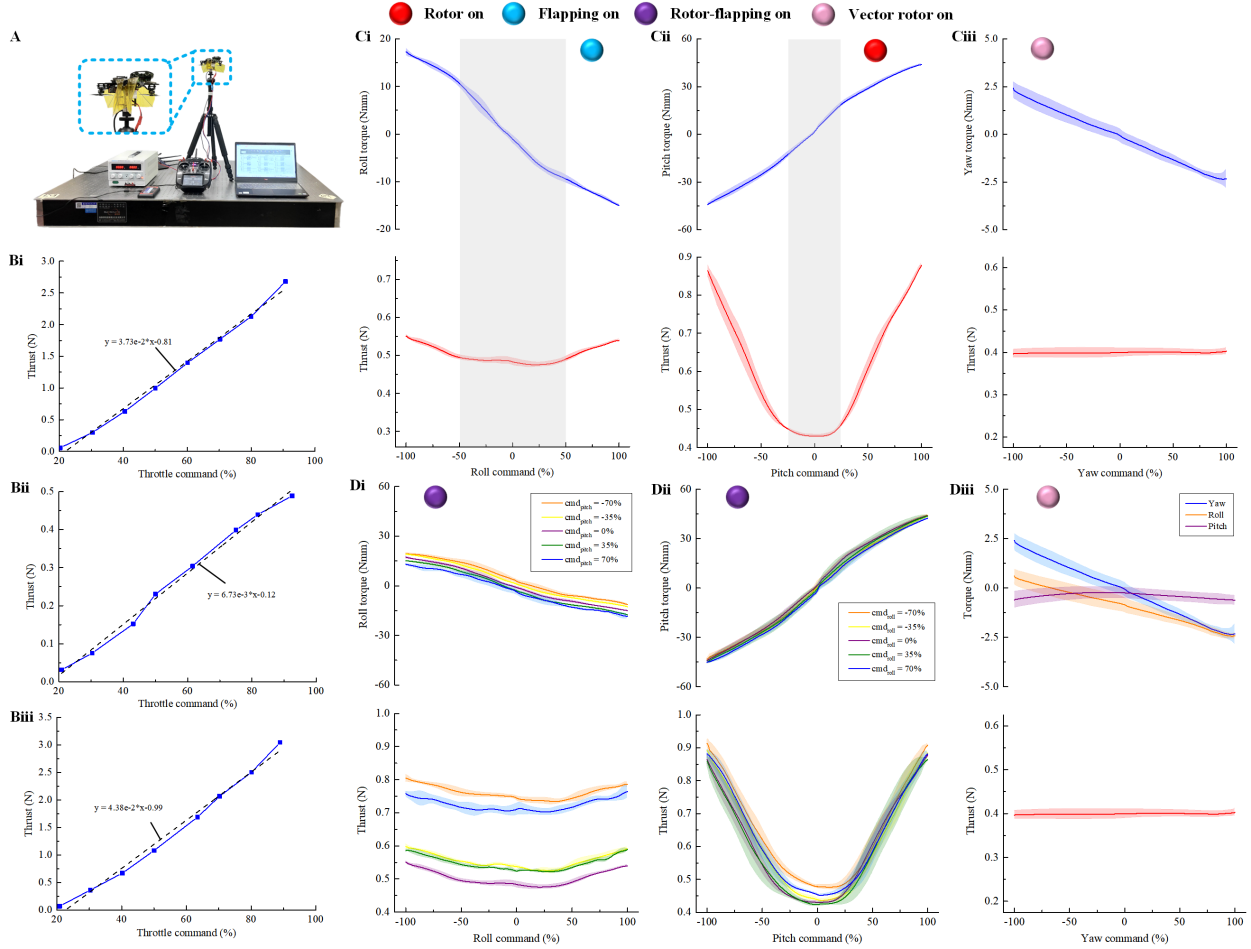
图5 空-壁两栖机器昆虫在滚转/俯仰/偏航控制输入下的扑翼旋翼混合动力的力与力矩测量
最后,作者控制机器昆虫在亚克力板壁面进行飞行-爬行间的相互转换实验,对机器昆虫的飞爬转换性能进行量化。分析得到,机器昆虫完成连续完整的飞-爬-飞转换最长时间为6.1 s。飞-爬转换过程耗时0.40 ± 0.03 s,爬-飞转换过程耗时0.70 ± 0.09 s,在竖直壁面的爬行速度为6 cm/s。空-壁两栖机器昆虫的旋翼动力提高了飞行速度,室外飞行的最大速度为6.8 m/s,这展示了机器昆虫在空中飞行与壁面爬行间过渡的能力,验证了总体结构布局与飞爬转换控制策略的可行性(图6)。

图6 空-壁两栖机器昆虫的飞行-爬行-飞行转换实验
未来,空-壁两栖机器昆虫将得到不断完善。团队将进一步优化布局设计,改进爬行机构以及旋翼在爬行阶段中对机器人运动方向的控制。此外,在机器昆虫爬行部分黏附垫的注模过程中增加微观钩爪,真正做到类似昆虫的钩爪与黏附垫协同作用的爬行机制,以帮助其适应更粗糙表面的环境。将来还准备对机器昆虫的导航、感知、自主控制和远距离通信进行补充,并设想机器昆虫可以使用机器学习方法来优化飞爬转换过程的动力分配,或针对特定目标进行自主检测、识别和跟踪。
以上文章转载于微信公众号Research科学研究,如有侵权,请及时联系我们修改或进行删除。
