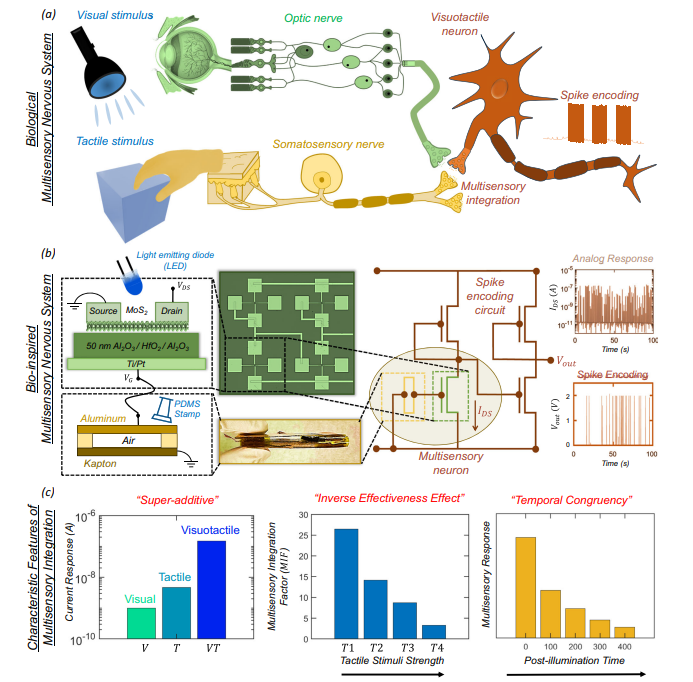
多感觉整合是大脑的一个显着特征,与单感觉整合相比,它能够做出更好更快的反应,特别是当单感觉线索较弱时。从两种或多种感觉方式接收汇聚输入的专门神经元负责这种多感觉整合。可以模拟这些多感觉神经元反应的固态设备可以推进神经形态计算并弥合人工智能和自然智能之间的差距。
在这里,宾夕法尼亚州立大学Saptarshi Das介绍了一种基于光敏单层 MoS2 薄膜晶体管和摩擦电触觉传感器集成的人工视觉触觉神经元,它精确地捕捉了多感觉集成的三个基本特征,即超加性响应、逆有效性效应和时间一致性。
文章要点
1)人工视觉触觉神经元还实现了一种电路,可以将视觉触觉信息编码为数字尖峰事件,尖峰概率由视觉和触觉线索的强度决定。
2)对仿生多感官视觉触觉神经元和尖峰编码电路的全面演示将推动神经形态计算领域的发展,迄今为止,神经形态计算领域主要关注单感觉智能和信息处理。
以上文章转载于微信公众号奇物论,如有侵权,请及时联系我们修改或进行删除。
参考文献
Sadaf, M.U.K., Sakib, N.U., Pannone, A. et al. A bio-inspired visuotactile neuron for multisensory integration. Nat Commun 14, 5729 (2023).
DOI:10.1038/s41467-023-40686-z
信息发布人: Saptarshi Das
发布单位: 宾夕法尼亚州立大学
信息源: https://doi.org/10.1038/s41467-023-40686-z
