生物系统中的纤维结构在生物运动行为中起到关键作用。纤维主导软致动器在软体机器人、柔性电子和生物医学设备等诸多领域起到了重要影响。相较于常规均质软致动器,仿生纤维主导软致动器在控制方式上做了简化以及优化,可以在如湿度、温度、化学物质等外部刺激下实现快速响应致动。

吉林大学任露泉院士课题组在Journal of Bionic Engineering上发表题为《Fiber dominated Soft Actuators Inspired by Plant Cell Walls and Skeletal Muscles》的学术论文。 在自然界,可发生变形的植物组织和动物肌肉都是由纤维介导的复合材料,纤维分别起被动迫使组织变形和主动驱动肌肉变形的作用。作者团队受到植物细胞壁以及动物骨骼肌的启发,通过4D打印方式,用碳纤维和活性聚酯纤维分别制备出被动式纤维主导软致动器和主动式纤维主导软致动器。其中,被动式纤维主导软致动器致动能力主要受到打印参数、结构参数和纤维角度影响,而主动式纤维主导软致动器的致动方式主要受到纤维角度和载荷的影响。
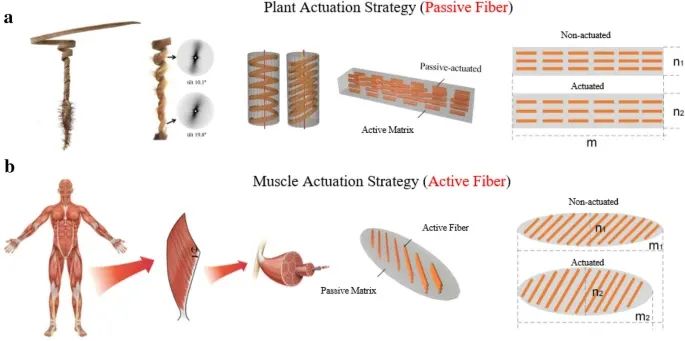
图1.纤维主导原型示意图:a植物系统中天竺葵科被动式纤维主导的微观结构;b动物系统骨骼肌主动式纤维主导的微观结构。
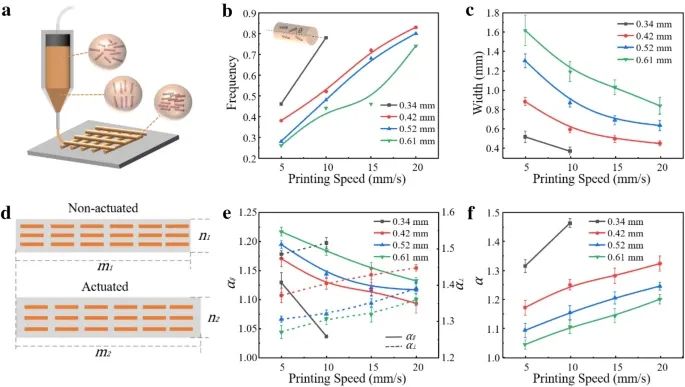
图2. 研究了工艺参数对3wt.%纤维含量的碳纤维增强聚氨酯复合材料膨胀性能的影响。a浆料直写3D打印工艺原理图;b打印速度和喷嘴直径对纤维取向程度的影响;c打印速度和喷嘴直径对打印线条宽度的影响;d聚氨酯增强硅胶复合材料膨胀示意图;e打印速度和喷嘴直径对膨胀率的影响;f打印速度和喷嘴直径对膨胀率各向异性系数的影响。
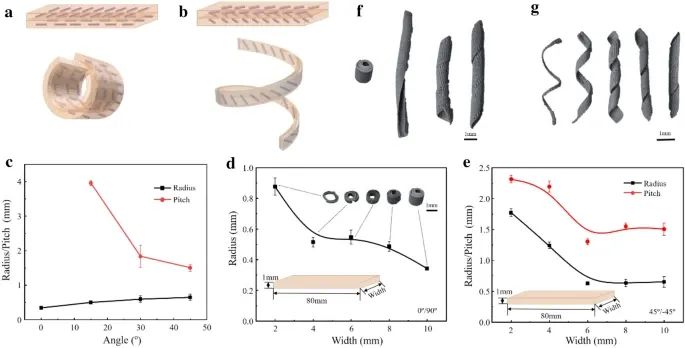
图3. 纤维角度和结构参数对被动致动器变形的影响。a 0°/90°双层结构的变形原理;b 45°/−45°双层结构的变形原理;c不同纤维角度对双层结构变形的影响;d试样宽度对0°/90°双层结构变形的影响;e试样宽度对45°/−45°双层结构变形的影响;f不同纤维角度双层结构的变形外观;g试样宽度(2、4、6、8和10 mm)对45°/−45°双层结构变形的影响。
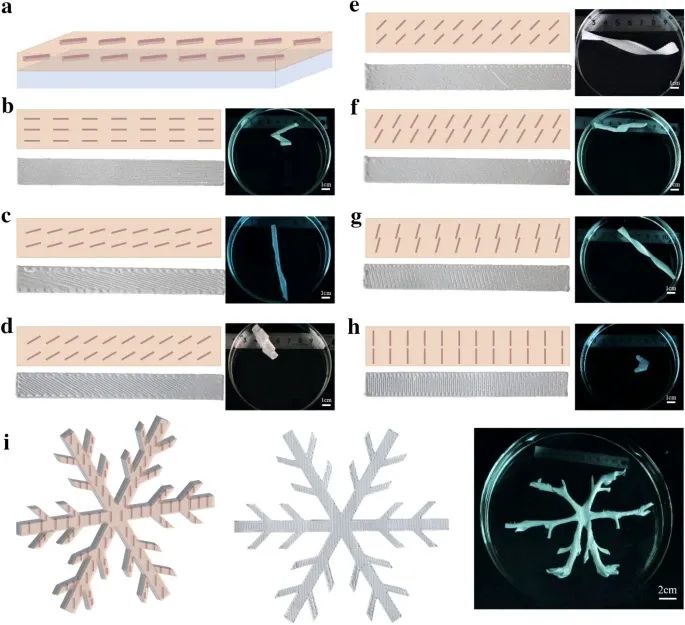
图4.复合/纸被动纤维致动器。a碳纤维增强聚氨酯复合材料/纸的致动器原理图;不同纤维角度:b 0°、c 15°、d 30°、e 45°、f 60°、g 75°、h 90°双层结构变形后的原理图和照片;i 雪花结构变形前后的原理图、实物图和照片。
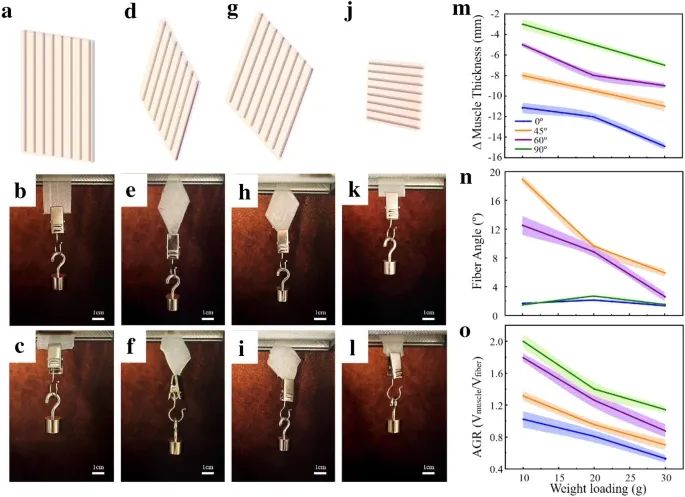
图5. 纤维角度和载荷对主动纤维主导的软致动器的影响。a 0°、d 45°、g 60°、j 90°纤维角示意图。b 0°、e 45°、h 60°、k 90°纤维角实物图。主动纤维主导的软致动器收缩后c 0°、f 45°、i 60°、l 90°纤维角实物图;m不同载荷和纤维角度对致动器肌肉厚度的影响;n不同负载和纤维角度对致动器纤维旋转程度的影响;o不同负载和纤维角度对致动器的结构齿轮比的影响。
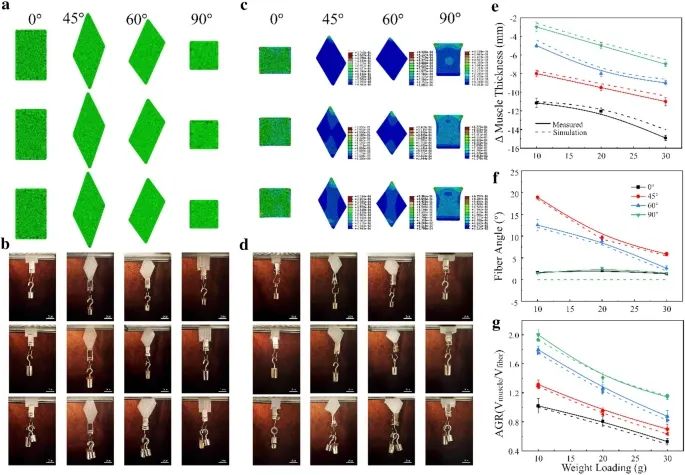
图6 .主动式纤维主导致动器的实验与仿真结果。a加载试验前不同荷载下的模拟模型(从上到下荷载为10、20、30g);b加载试验前不同荷载下的实验模型从上到下荷载为(10、20、30g);c加载试验后不同荷载下的模拟结果(从上到下荷载为10、20、30g);d加载试验后不同荷载下的实验模型(从上到下荷载为10、20、30g);e不同载荷和纤维角度对致动器肌肉厚度的实验结果与仿真结果比较;f不同载荷和纤维角度对纤维旋转角度的实验结果与仿真结果比较;g不同载荷和不同纤维角度对致动器结构齿轮比的实验结果与仿真结果比较。
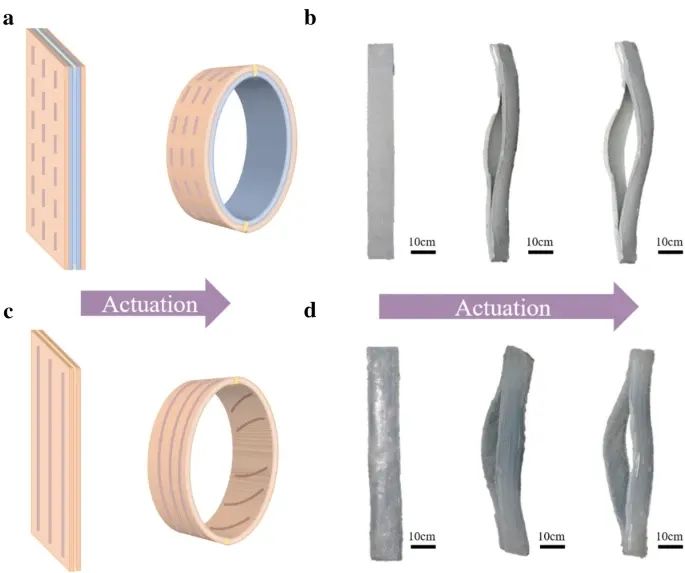
图7. 由两种致动器制备的生物致动器。a被动式纤维主导结构设计原理图;b被动式纤维主导结构的致动过程;c主动式纤维主导结构设计原理图;d主动式纤维主导结构的致动过程。
结论:纤维在生物材料的构建中起着决定作用。本文揭示了纤维在动态生物材料中的作用机理,对于促进高性能仿生致动器的发展至关重要。基于主动基体嵌入增强纤维实现不同形式膨胀行为的机理,采用4D打印方法制备了碳纤维增强聚氨酯复合材料的被动式纤维主导致动器。研究了工艺参数和纤维角度对执行器变形的影响。实验结果表明,工艺参数影响纤维取向程度,从而影响复合材料的膨胀性能。此外,本文基于被动式基体嵌入柔性纤维介导变形行为的机理,采用预拉伸聚氨酯纤维增强硅胶,通过4D打印方法制备了主动式纤维主导致动器。实验分析了纤维角度和载荷对驱动方式的影响。实验结果表明,随着载荷的逐渐增大,执行器的厚度逐渐变薄。最后,作者基于两种不同的致动机制制备了相同单元的超结构,使超结构在外界刺激下从二维到三维变形。该研究解释了生物纤维为主导的复合材料的变形机理和力学行为,为仿生软致动器、超材料等的设计奠定了基础。
