受生物系统的启发,柔性致动器能够将各种环境刺激如湿度、光、电场/磁场、pH值变化和压力等转化为精确的机械变形。其中光致动器能够无线操作,且具有优秀的时间和空间分辨率,引起了众多研究人员的关注。过渡金属碳化物/氮化物(MXene)作为新型层状二维材料,具有和石墨烯类似的性质,但具有更高的电导性、热导性、光热转换效率、优秀的电磁波吸收能力、亲水性及良好的分散性等。特别是Ti3C2Tx,成为制造高性能光热致动器的首选材料。尽管一些基于MXene的具有优异驱动特性和可编程特性的单个致动器已被实现,但仍存在单个致动器难以执行智能系统中复杂任务的固有限制,需要创新的解决方案来弥合这一差距。
为了解决这一问题,浙江大学、之江实验室陈梦晓、杨青、王贤迪和新加坡南洋理工大学魏磊教授团队创造性地提出了一种基于MXene-纤维素纳米纤维(CNF)柔性致动器的可延展仿生动态矩阵。该致动器件将传感层和致动层相结合,通过接触起电和静电感应实现了0.3 kPa低触发传感,并提供即时致动反馈(90 ms)。受含羞草启发,3 3柔性智能动态矩阵不仅能准确地识别接触刺激的位置,还能通过可延展致动提供即时反馈,实现闭环。该研究为开发自主感知智能集群软体机器人提供新途径。该研究第一作者为之江实验室代甜甜和NTU刘雁婷,以题为“Bioinspired Dynamic Matrix Based on Developable Structure of MXene-Cellulose Nanofibers (CNF) Soft Actuators”的论文发表在最新一期《Advanced Functional Materials》上。
【仿生MXene-CNF/PDMS柔性动态矩阵】
生物系统已发展出复杂的调节机制来有效地适应复杂的环境变化,它们能够对周围环境中的各种刺激进行自我感知和自主反应。例如含羞草受到表面的外部刺激,自动收缩其叶子,从而减轻来自动物和恶劣天气条件的潜在伤害,受生物强大自适应能力的启发,柔性致动器能够将各种环境刺激转化为精确的机械变形,在软体机器人、人工肌肉、信息加密和智能系统等方面展现了巨大的应用潜力。基于此,研究人员提出了一种基于MXene-纤维素纳米纤维(CNF)柔性致动器可展开结构的动态矩阵。受益于传感和致动功能的结合,MXene-CNF/ PDMS柔性致动器在受到外部刺激下,具有自传感反馈功能。
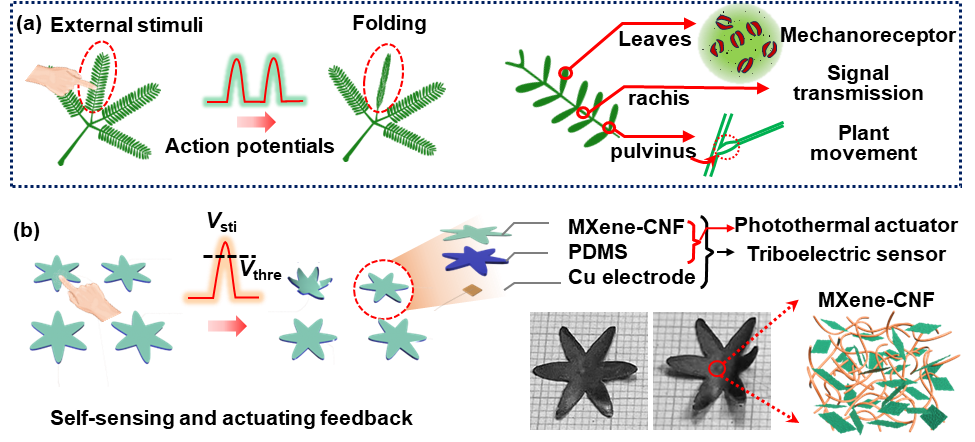
图1. 具有智能本体感知和即时反馈能力的仿生动态矩阵
【MXene-CNF/ PDMS致动器的性能】
研究人员通过选择性刻蚀Ti3AlC2 MAX相中的Al层,制备了Ti3C2Tx MXene分散体。Ti3C2Tx与CNF复合得到MXene-PDMS混合物,将其滴涂到固化的PDMS膜上,烘干,得到MXene-CNF/ PDMS膜。由于CNF表面丰富的羟基的存在及与MXene表面形成氢键,CNF的加入使MXene-CNF/ PDMS膜具有更好的亲水性及机械性能。随后,研究人员对MXene-CNF/ PDMS膜的致动性能进行测试,在808 nm的激光(200 mW/cm2)下辐照4 s,致动弯曲角度能达到约50º,并能在停止辐照8 s内恢复至原始状态,具有良好的致动可逆性,致动强度与激光功率密度成正比,且具有良好的长期稳定性。此外,MXene-CNF不仅作为光致动器的光热转换层,同时作为摩擦电触觉传感层,经过对其摩擦电传感性能的表征,随着接触面积及接触压力的增大,输出电压呈线性增长,在固定接触面积为1 1 cm2情况下,存在超低的摩擦电接触传感检测(约0.3kPa)。
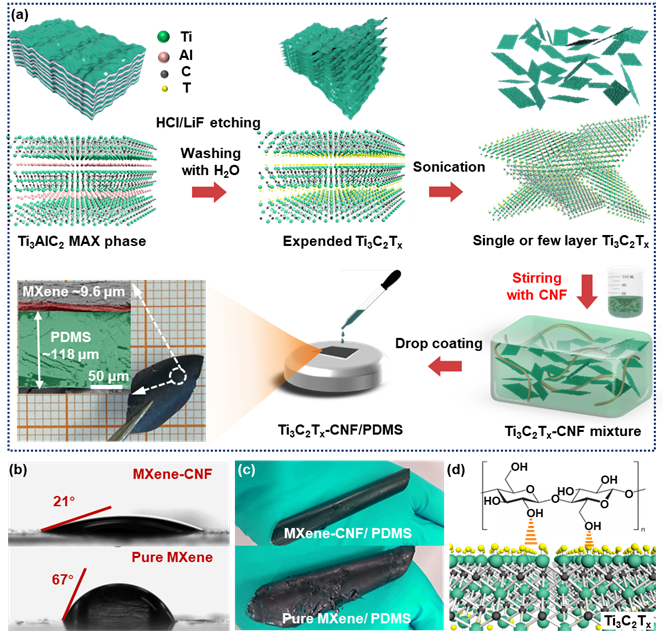
图2. MXene-CNF/PDMS双层致动器的制备
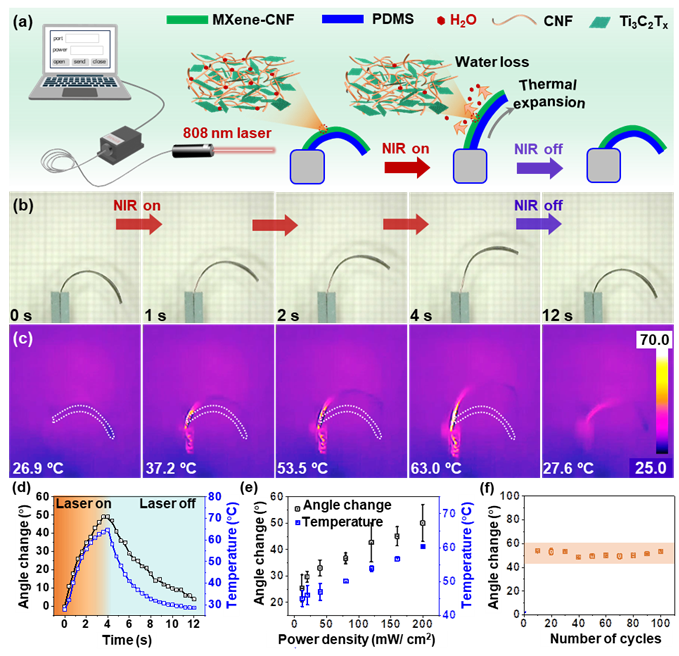
图3. 808nm激光驱动的双层致动器致动性能研究
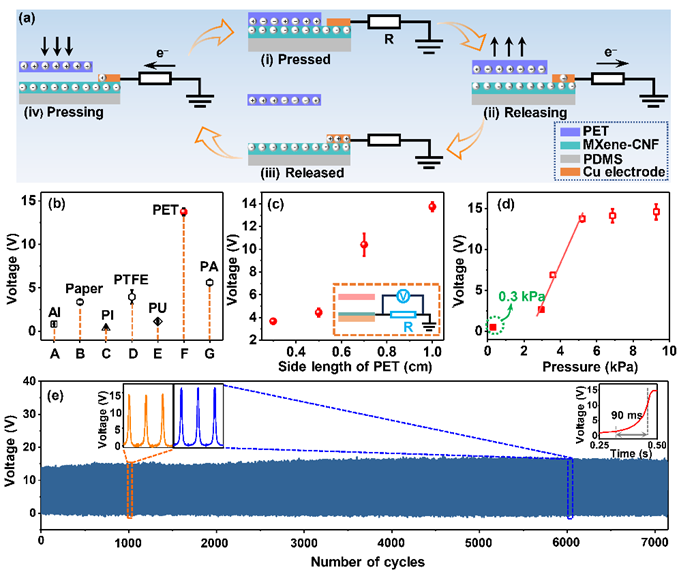
图4. MXene-CNF/PDMS作为单电极摩擦电传感器对不同接触材料的电学输出特性
【具有自传感反馈功能的柔性智能动态矩阵】
为了研究MXene-CNF/PDMS膜在机器人系统中的潜在应用,研究人员设计了一种基于双层薄膜的六角形柔性致动器。这种弯曲的非对称曲率设计可以在固定位置利用近红外光通过机器人本体的伸缩来实现曲线运动和转向运动。除了单个运动致动器外,还制备了一个3 3致动器矩阵。受含羞草的启发,这种智能动态矩阵可以提供本体感知和高效即时致动反馈功能。当仿生致动器接收到瞬态外界刺激时,由于接触充电与静电感应之间的耦合作用,触觉传感层可以检测到摩擦电信号。其中接触位置的输出电压信号明显高于其他未触及的元素。因此,可以识别触发点位置,控制激光器移动,引起致动反馈。该智能传感反馈系统能够成功地识别“5”和“8”位置,并有序地进行反馈。此外,也可利用其可编程光致动特性和摩擦电传感能力,通过结构设计实现柔性致动器弹射装置。这些发现为设计和制造生物启发的软驱动器提供了宝贵的意见。
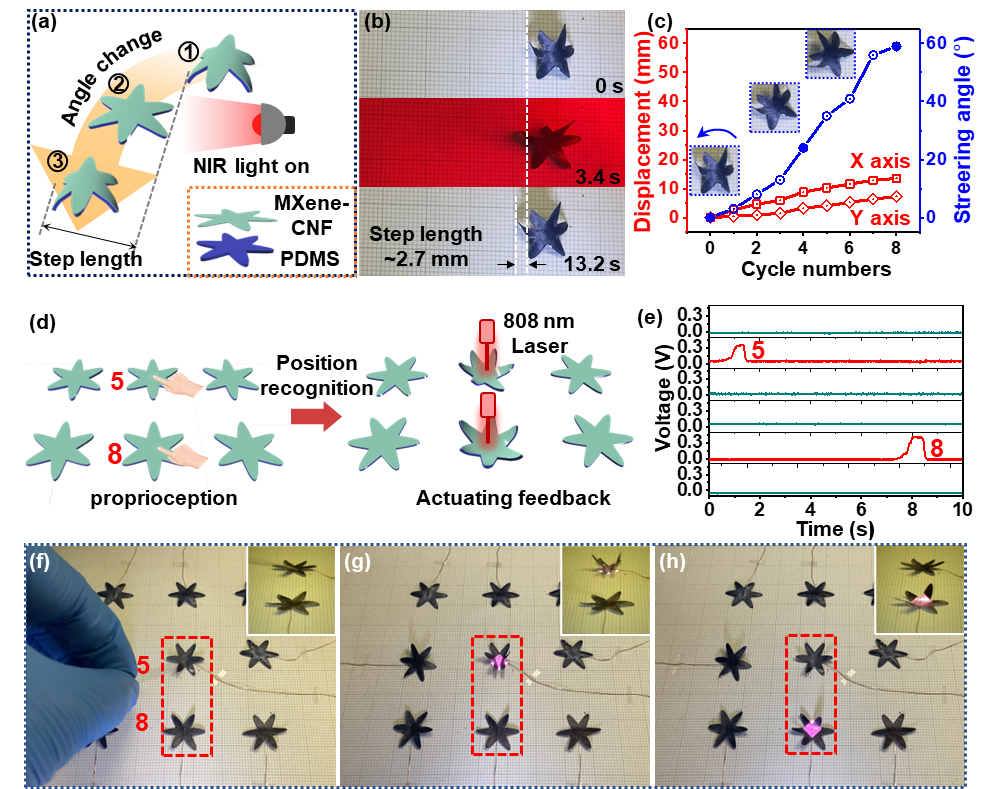
图5. 基于MXene-CNF/PDMS的单一软体机器人和智能动态矩阵的仿生柔性致动器
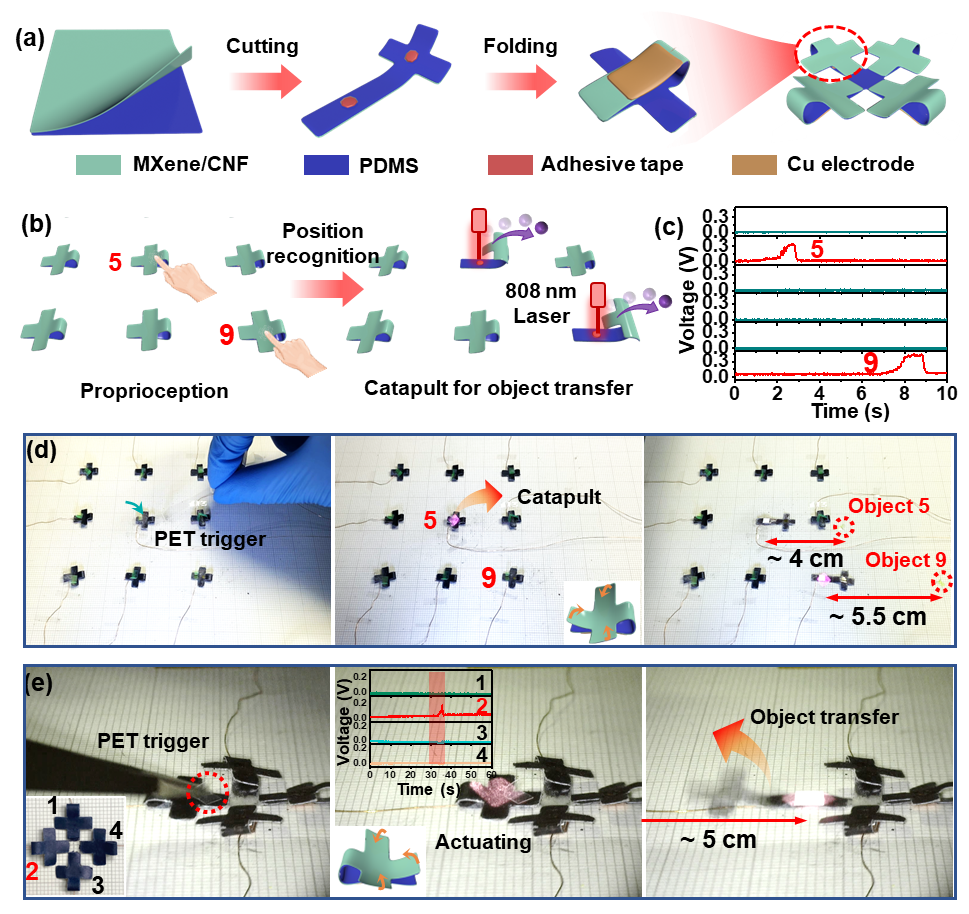
图6. 基于位置识别和可编程驱动能力的智能物体转移系统
总结:研究人员基于MXene-CNF/ PDMS柔性致动器的可展开结构,研制了一种新型的生物启发的动态矩阵。CNF的加入显著提高了MXene的力学性能。通过集成传感层与致动层,实现了0.3 kPa的超低触控检测,基于该器件的仿生矩阵可以准确识别触觉刺激的位置,并通过可展开的运动提供即时动作反馈。这项工作为提高柔性致动器执行复杂任务的能力提供了新的可能。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
