软体机器人有潜力协助和补充人类对极端和恶劣环境(例如有机溶剂)的探索。然而,在各种有机溶剂中性能稳定的软机器人尚未开发出来。
近日,东华大学游正伟/管清宝团队以水母为灵感,采用4D可编程策略制作了一种基于光敏液晶弹性体的非欧几里得板水下软机器人。具体来说,该机器人采用了3D打印的非欧几里得板,采用阿基米德方向设计,当浸入有机溶剂中时,该板会自动变形以释放内应力。在近红外光的帮助下,机器人内部的有机溶剂蒸发并以气泡流的形式产生推进力。以NEP-Jelly为灵感开发的软体机器人可以在各种有机溶剂中高度自由地游泳,例如N, N-二甲基甲酰胺,N, N-二甲基乙酰胺,四氢呋喃,二氯甲烷和三氯甲烷,这在以前没有报道过。除了仿生水母,各种水生无脊椎动物启发的软体机器人也可以通过类似的4D可编程策略来制备。
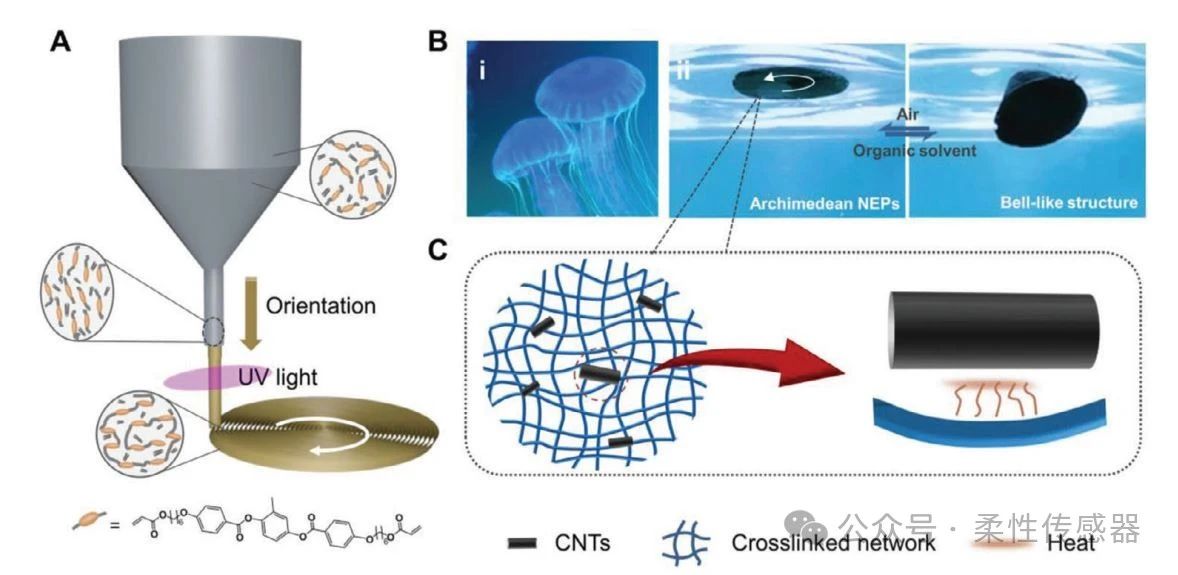
图1 NEP-Jelly启发的软体机器人设计和制造
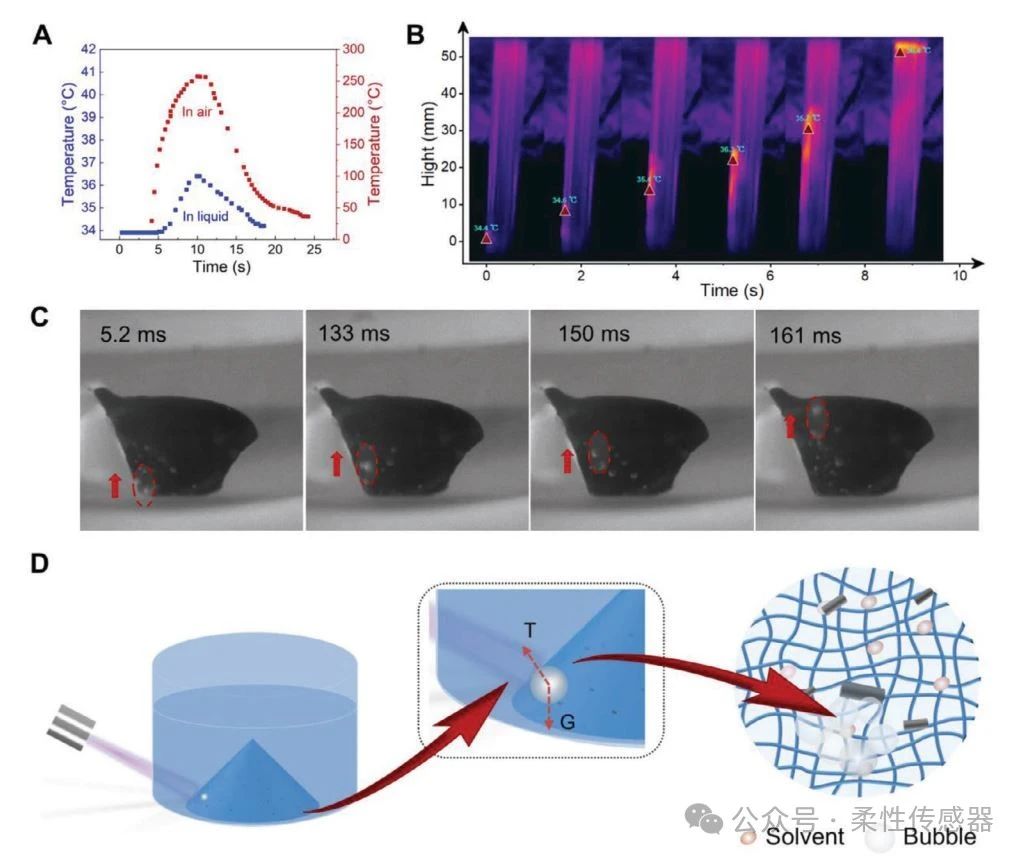
图2 受NEP-Jelly启发的软体机器人运动机理
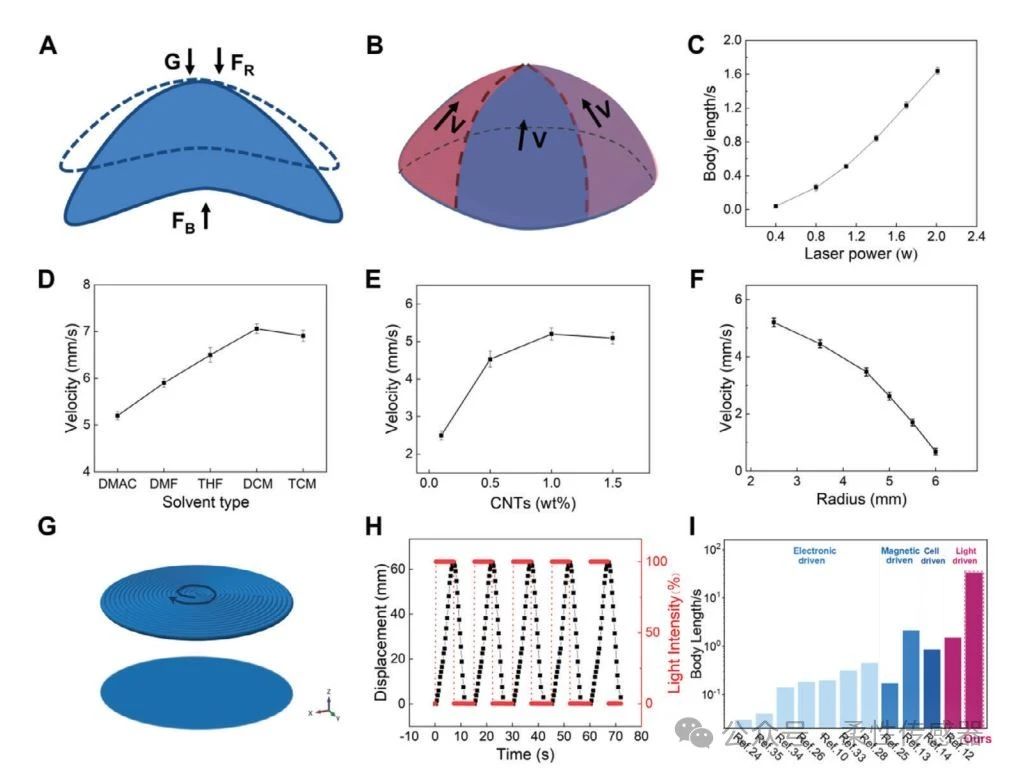
图3 以NEP-Jelly为灵感的软体机器人浸泡在不同有机溶剂中的驱动力和速度分析
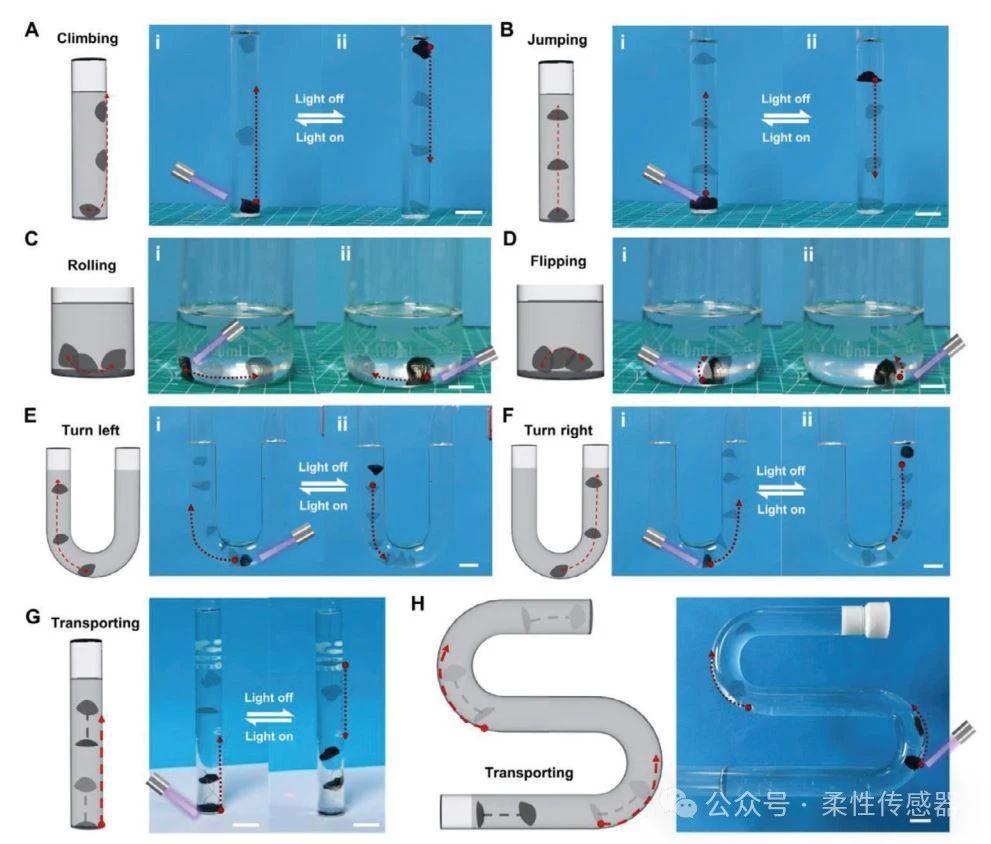
图4 以NEP-Jelly为灵感的软机器人在DMAc中的各种运动
原文题目:4D Printed Non-Euclidean-Plate Jellyfish Inspired Soft Robot in Diverse Organic Solvents
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
信息发布人: 游正管、清宝
发布单位: 东华大学
信息源: https://onlinelibrary.wiley.com/doi/10.1002/adma.202313761
