湿度在自然界中无处不在,许多植物都能对自身或周围环境的湿度变化做出反应,以实现特定的生物功能,这是它们生存机制的一部分。比如,含羞草叶片的张开或闭合、松果鳞片的张开或闭合以及燕麦芒的扭转运动。这些现象启发了研究人员设计湿度响应薄膜驱动器。湿度响应薄膜驱动器可以感知环境湿度变化,并通过薄膜的非对称膨胀可逆地改变其形状或运动方式。基于这种响应能力,湿度响应薄膜驱动器可广泛应用于传感器、能量收集装置、仿生设备以及软体机器人等领域。近日,吉林大学梁云虹教授、马愫倩副教授团队报道了一种由琼脂糖(AG)和经聚乙烯吡咯烷酮(PVP)修饰的氧化石墨烯(GO)自组装而成的单层薄膜驱动器,简称PGO/AG复合薄膜。该薄膜展现出超快的湿度响应性能,并能够通过水分蒸发驱动做快速滚动运动。此外,该薄膜还能模拟花朵、含羞草的开合以及由周期性水蒸气驱动的快速爬行机器人。相关研究成果以“A humidity-driven film with fast response and continuous rolling locomotion”为题发表在《Chemical Engineering Journal》上(IF =13.3)。吉林大学机械与航空航天工程学院博士生林森和吉林大学工程仿生教育部重点实验室马愫倩副教授为文章第一作者,吉林大学工程仿生教育部重点实验室梁云虹教授为文章通讯作者。
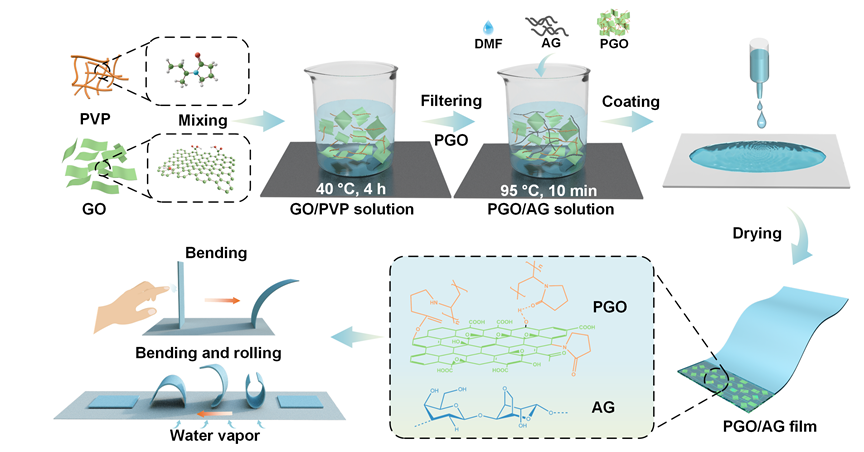
图1 PGO/AG复合薄膜的制备和应用示意图
对于湿度响应薄膜驱动器,“响应”是指薄膜对湿度刺激做出反应并达到最大变形的过程。在检测到外部湿度刺激后,薄膜从初始状态过渡到最大弯曲状态所需的持续时间称为响应时间。相反,恢复是指薄膜对湿度刺激做出反应,达到最大变形,随后在湿度刺激停止后恢复到初始状态的过程。当外部湿度刺激消失时,薄膜从最大弯曲过渡到初始状态的持续时间称为恢复时间。试验证明,薄膜厚度影响其湿度响应性能。因此,本文选择厚度约为20 μm的AG薄膜进行后续工作。为进一步增强AG薄膜的湿度响应性能,将琼脂糖粉末与PGO溶液在高温下混合,然后在室温下采用流延法合成了柔性PGO/AG复合薄膜。
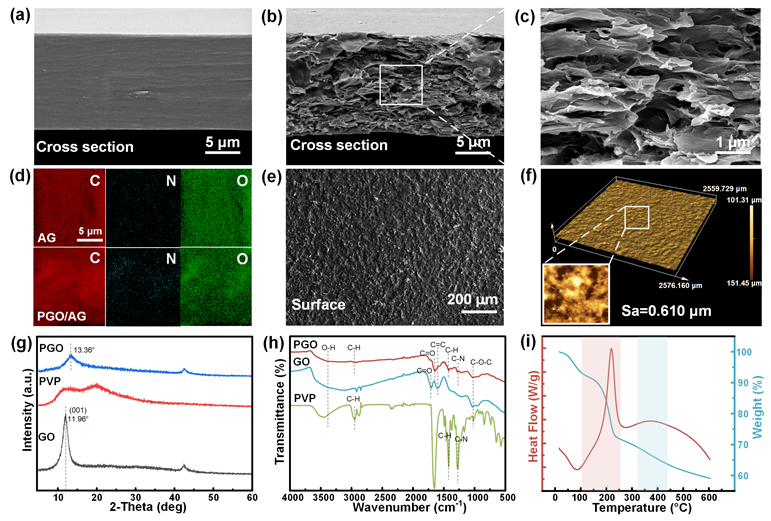
图2 PGO/AG复合膜的理化性质表征
首先对PGO、PGO/AG复合膜的理化性质进行了测试。与AG薄膜的光滑截面相比,PGO的掺入使薄膜横截面形成有序的空隙结构,变得更粗糙,并呈现典型的褶皱和波纹。这种空隙结构有助于水分子的快速扩散,从而实现高度敏感的湿度响应。能量色散光谱(EDS)结果进一步证明,PGO/AG复合膜比琼脂糖膜含有更多的氮,证实了PVP对GO的修饰。此外,PGO/AG复合膜的微观表面不均匀,这样可以进一步增加薄膜与水分子之间的接触面积,而不会影响薄膜表面的宏观结构。通过ATR-FTIR、XRD、DSC-TGA分析证实了PVP与GO的化学结构和相互作用。PVP与GO表面的结合可以提供额外的水分子结合位点,进一步增强GO的吸湿性。并且,PGO的玻璃化转变温度(Tg)从84 °C(GO)移动到89 °C,表明PVP链与GO之间的强相互作用抑制了GO分子的运动,这一结果也有助于确认PVP在GO表面的接枝过程。
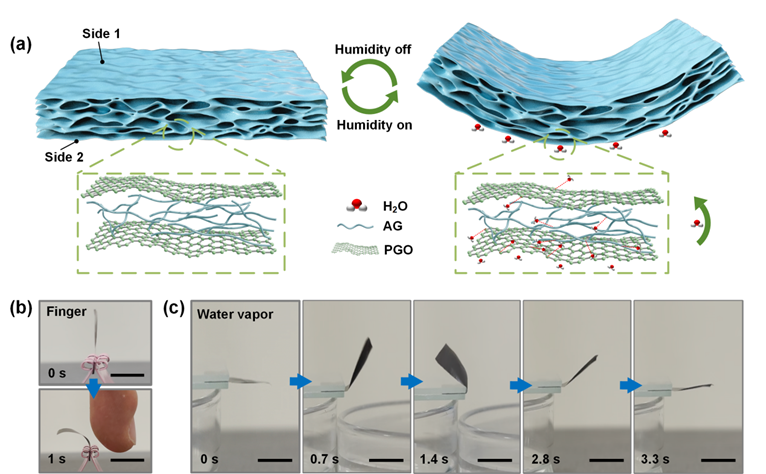
图3 PGO/AG复合膜驱动器的变形及机理
在湿度响应变形机制方面,薄膜运动的驱动力是基于顶面和底面之间的湿度差,当薄膜的一侧首先接触到湿气时,这一侧会快速吸收水分并产生膨胀效果,而另一侧还没有接触到水分,短时间内由于薄膜两侧的膨胀程度存在差异,会驱动薄膜向远离湿度刺激源的方向弯曲。当一根手指靠近薄膜的一侧时,薄膜会自发地向另一侧弯曲约90°,当手指移开时,薄膜会恢复到直立的形状。为了进一步观察和演示水蒸发驱动的湿度响应行为,使水蒸气不断靠近和远离PGO/AG复合薄膜,使其在弯曲到最大角度和恢复到初始状态之间循环运动。这表明PGO/AG薄膜具有较高湿度敏感性,在低湿度和高湿度刺激下均能表现出可逆的弯曲变形。
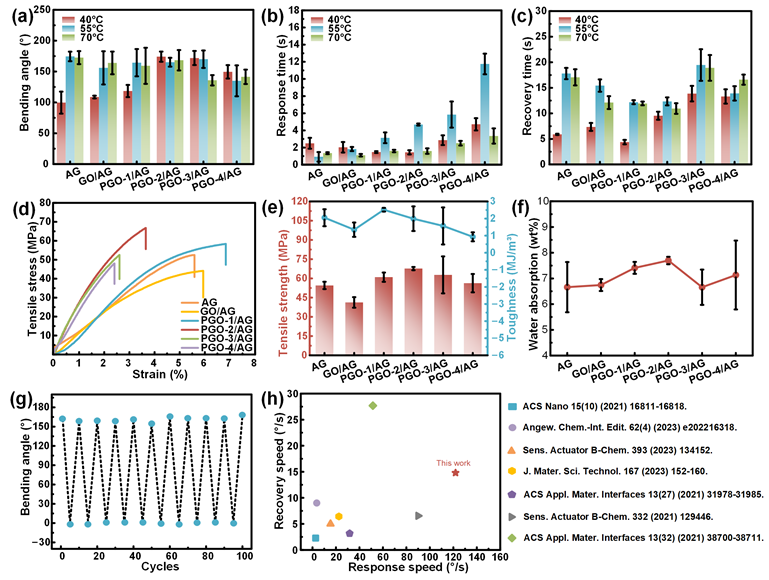
图4 PGO/AG复合薄膜驱动器的机械和湿度响应和性能
薄膜的机械性能对于设计高性能湿度驱动执行器以确保实际应用中的耐用性和可靠性至关重要。PGO-2/AG薄膜的拉伸应力较大(333.4 MPa),这是由于PGO在AG基体内分散性较好,界面作用力较强,形成了均匀分布的增强网络,并建立了牢固的界面结合。随后,测试了不同PGO/AG复合薄膜的吸湿性、水接触角等性能。结果表明,PGO/AG复合薄膜具有较高的水分子捕获能力。PGO-2/AG复合膜在响应速度(124.58°s−1)和恢复速度(18.87° s−1)方面,其性能优于先前报道的湿度响应驱动器。
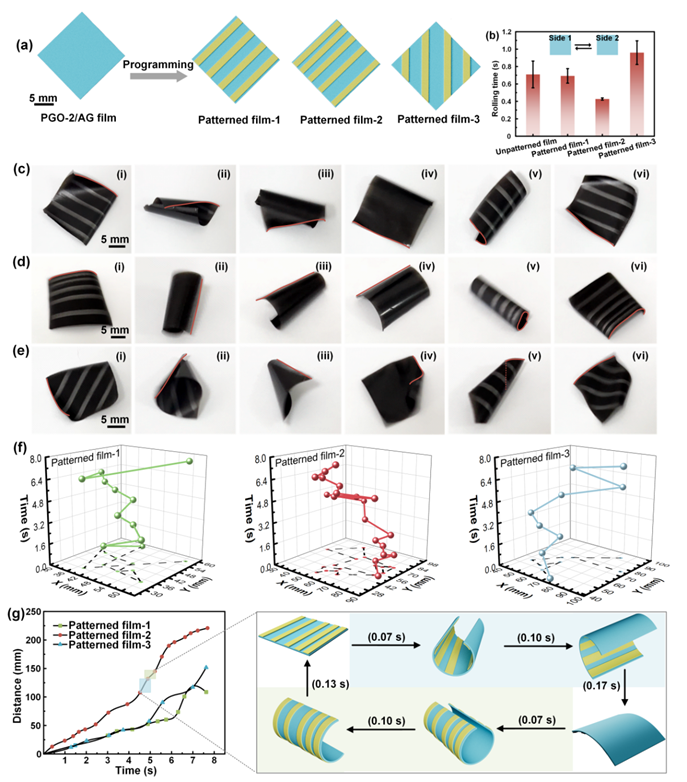
图5 湿度驱动表面图案化薄膜的滚动运动性能
当PGO-2/AG复合膜暴露于水分蒸发产生的湿度梯度(40 °C)下时,该膜表现出滚动运动特性。有趣的是,在滚动运动的循环中,薄膜的滚动方向不断有规律地交替。这是因为薄膜的滚动是基于上表面和下表面之间的湿度梯度。在与潮湿的基材接触时,薄膜的两个表面会以不同的方式膨胀,从而导致周期性的滚动运动。实现湿度响应驱动器的可控变形和可编程运动是研究人员一直所追求的。因此,使用碳涂层对PGO-2/AG薄膜表面进行了图案化设计。为了可视化图案化薄膜的滚动运动特性,我们通过观察整个滚动运动周期的方向、速度和轨迹,研究了图案化薄膜在湿度刺激下的运动特性。在翻滚过程中,碳涂层条纹的排列会影响翻滚速度,而弯曲方式不受影响。其中,不均匀分布的垂直条纹在薄膜弯曲过程中会导致应力分布的显着差异,从而加快翻滚速度,平均翻滚速度达到28.73 mm s−1或 1.44 BL s−1。
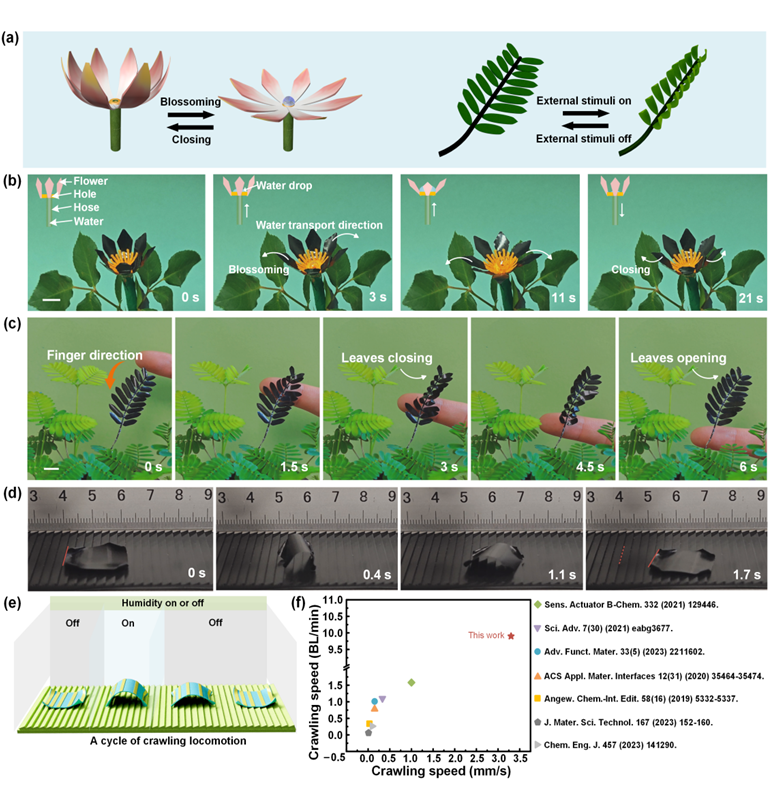
图6 湿度驱动薄膜驱动器的应用演示
最后,利用PGO-2/AG复合膜的湿度响应特性,创建了仿生应用演示,包括仿生花和仿生含羞草。仿生花瓣由薄膜制成,雄蕊中央有穿孔。花枝连接到调节水流进出花朵的软管上,水滴在雄蕊中间形成,形成以雄蕊为中心的湿度梯度。在感应到湿度刺激后,薄膜会迅速弯曲和变形,模仿开花的过程。然后,水滴通过软管排出,湿度刺激消失,薄膜恢复到初始状态,表现为花瓣闭合。仿生含羞草通过手指提供湿度刺激,当手指沿着仿生含羞草枝茎向下移动时,薄膜会随着手指的经过而迅速弯曲和变形,类似于含羞草叶被刺激闭合。图案化PGO-2/AG薄膜被设计为展示由湿度梯度驱动的软体爬行机器人。通过位于机器人正上方的玻璃管间歇性地输送水蒸气,机器人检测到水蒸气引起其上表面的膨胀和向下弯曲,吸收更多的水分子并导致整体“n”形。因此,机器人的左侧会经历更大的摩擦和阻力,从而形成支点。去除水蒸气后,机器人拉直并支撑自己推向右侧。经过几个循环后,机器人有效地向右侧移动。其爬行速度为3.3 mm s−1或 9.9 BL min−1。本文章采用琼脂糖(AG)和经聚乙烯吡咯烷酮(PVP)修饰的氧化石墨烯(GO)制备了一种湿度响应薄膜驱动器,不仅制备方法简单、成本低廉,而且具有快速响应和连续运动的能力。这种薄膜的应用潜力巨大,可以广泛应用于仿生设备、智能传感器和软体机器人等领域。此外,该研究为基于湿度响应薄膜的多功能驱动器设计提供了新的思路和方法,有望推动相关领域的技术进步和应用拓展。
以上文章转载于微信公众号国际仿生工程学会,如有侵权,请及时联系我们修改或进行删除。
