允许持续变形并与复杂动态环境的顺应性相匹配的软电子器件在一系列关键应用。软体机器人由类似于软生物组织的软材料制成,可以精确模仿软体动物的运动模式,具有无限的自由度,在移动、抓取、医疗护理和人机交互等广泛领域展示了其独特优势。然而,与软体动物不同的是,目前柔性电子设备中的传感器和执行器经常以分立或孤立的形式存在,因此导致了缺乏现场反馈、运动过程中界面不匹配、需要额外的集成步骤以及界面复杂度较高等问题。目前,软体机器人在开发完全闭环的自主决策系统方面仍存在一定的局限性,并且实现完整的人工肌肉系统依旧是挑战,特别是与先进智能算法结合实现传感和驱动融合。
为了解决这一问题,中山大学周建华教授、乔彦聪副教授团队联合清华大学任天令教授团队受海葵启发展示了一种智能类软体生物(SQO),它具有感驱一体化触手,能够实现实时状态识别和自主物体识别功能。通过采用异构机理同位集成(HMHI)策略,SQO的触手在相同的材料和结构下拥有同时感知形态变化和灵活驱动运动的独特能力。结合机器学习算法和定制电路,海葵形的SQO具备实时自主状态识别能力,十六种状态的识别准确率达到100%。通过构建人工神经肌肉系统实现主动自主感知,海葵形SQO能够识别并智能抓取静态物体,准确率高达80.7%,超过了人手的识别准确率(74.7%)。该工作为实现人工神经肌肉系统提供了一种前景广阔的方法,在智能软机器人和活体治疗等关键领域具有巨大的应用潜力。该研究以题为“Intelligent Soft Quasi-Organism Equipped with Sensor-Driven Integrated Tentacles”的论文发表在最新一期的《Advanced Functional Materials》上。
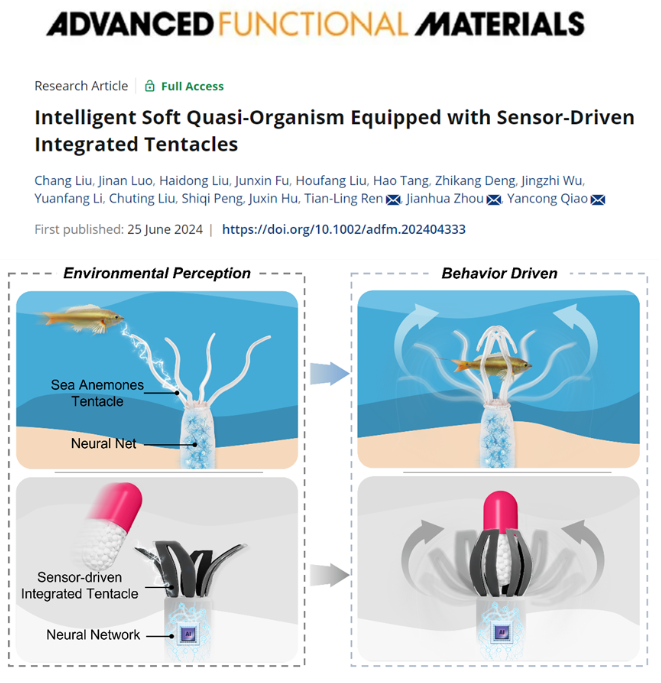
图1 受海葵启发的感驱一体智能类软体生命
【传感驱动一体化触手的设计】
SQO的每个触手都由四层组成,包括由激光诱导石墨烯(LIG)组成的功能层、由聚对苯二甲酸乙二醇酯(PET)胶带组成的转移层、由聚二甲基硅氧烷(PDMS)组成的驱动层和由聚酰亚胺(PI)组成的支撑层。通过一步法制造操作直接制备出具有设计几何图案的LIG。LIG 具有三维多孔结构,这是在高温激光过程中脱气形成的。LIG的拉曼光谱具有三个突出的峰值:由缺陷或弯曲的sp2碳键诱导的约1,350cm-1 处的D峰、约1,580 cm-1处的一阶拉曼G峰以及约2,700 cm-1处的源于二阶区界声子的2D峰。D-峰和G-峰的强度比约等于0.8,表明所获得的石墨烯结构缺陷少、质量高。SQO触手可实现5 mm到25 mm之间的多种尺寸制备,以适应不同场景的需求。在50V电压驱动下,单个触手可提供6.8 mN的驱动力。利用协同效应,四只触手可组成一个抓手,抓住重约1.1 g的物体,相当于其自身重量的31倍。当与液晶弹性体(LCE)结合时,驱动力可达116 mN。
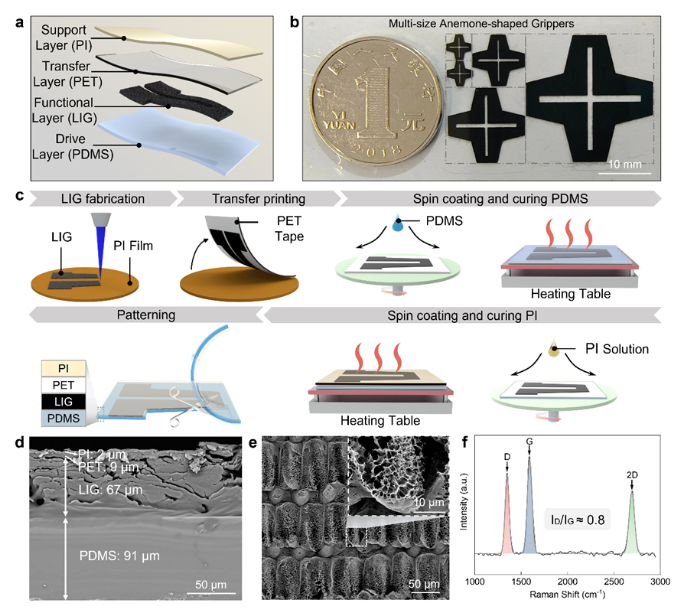
图2 传感驱动一体化触手的设计、制备和表征
【感驱一体触手的传感性能】
LIG的应变电阻效应和PDMS的稳定拉伸性使SQO触手能够作为应变传感器感知自身的变形和外部的触碰。丰富的多孔结构和叠层薄片使LIG对各种变形高度敏感。当LIG发生变形时,多孔结构会发生挤压和变形,导致导电通路宽度变窄、长度变长,这在宏观上反映为电阻值的增加。LIG应变传感器的相对电阻变化与拉力和应变变量都有关系,在4%应变范围内具有线性的相对电阻响应,GF系数为17.7。此外,在不同的拉伸频率、环境湿度和多次拉伸循环中,传感器应变响应保持一致。
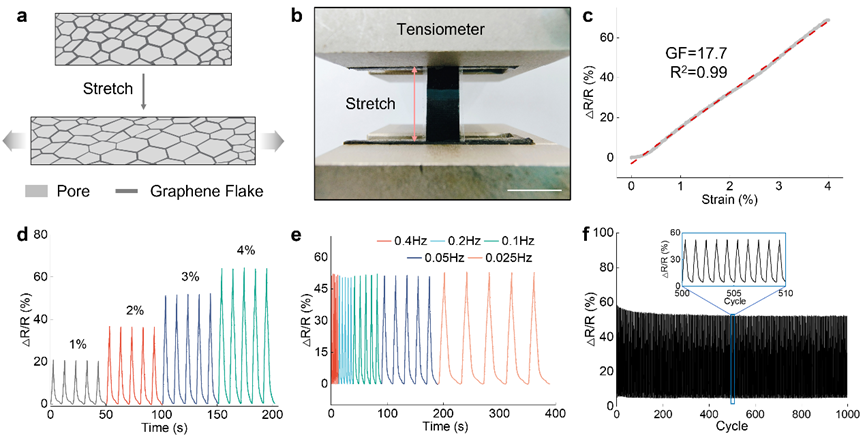
图3 SQO的应变传感性能
【感驱一体触手的驱动性能】
由于LIG优异的热特性和材料间的热膨胀差异,SQO可以作为电热致动器,动态改变其形状并抓取物体。通过对功能层的形状优化和设计具有梯度热膨胀系数的叠层结构,电热致动器具有优异的致动性能。在24V的驱动电压下弯曲角度达到496°,驱动能力优于同类型的电热制动器。温度的升高与弯曲角度呈现大致一致的线性变化(k=0.95)。致动器在不同的驱动电压下体现出了恒定的响应周期。通过理论推导和有限元仿真,作者对驱动器的电热响应行为进行原理分析,来优化触手的形状设计,提高驱动性能。
SQO中传感和驱动功能的整合是通过异构机理同位集成策略实现的。异构机理是指利用不同的物理机制实现传感和驱动功能。这两种功能使用相同的材料组合实现,使它们能够同位集成在一起。
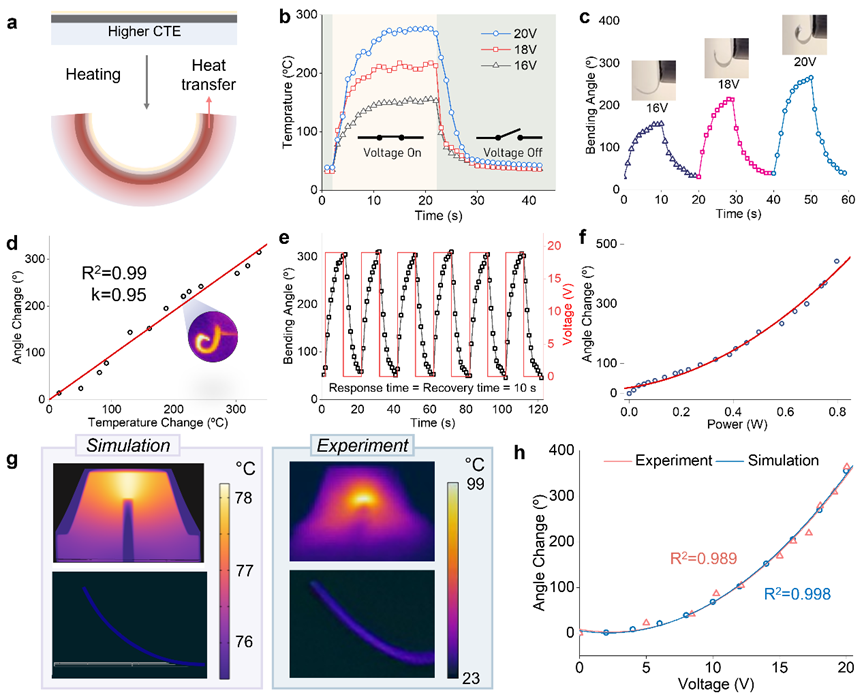
图4 SQO的电热驱动性能和有限元模拟
【用于状态识别的机器学习控制SQO】
海葵形的SQO通过触手对外部机械刺激进行感知,并运用机器学习算法对状态类型进行识别,从而实现自主控制相应的触手运动。采用人工智能控制算法处理海葵形状SQO捕获的感知数据,并提炼出与不同状态相关的模式。海葵形状SQO的感知行为可转化为十六种不同的状态。每个触手均具有独立感知外部机械刺激的能力,这些刺激表现为电阻值的变化。收集十六种状态的电阻变化曲线构建状态数据集,每种状态约有200个数据样本。将设计的CNN算法应用于海葵形SQO的状态数据集时,表现出快速学习能力。训练500个轮次后,训练集的准确率超过90%,训练2000轮后,准确率达到96.4%。测试集的混淆矩阵显示模型在海葵形状的SQO能够高准确率实现分类任务,准确率达到100%。
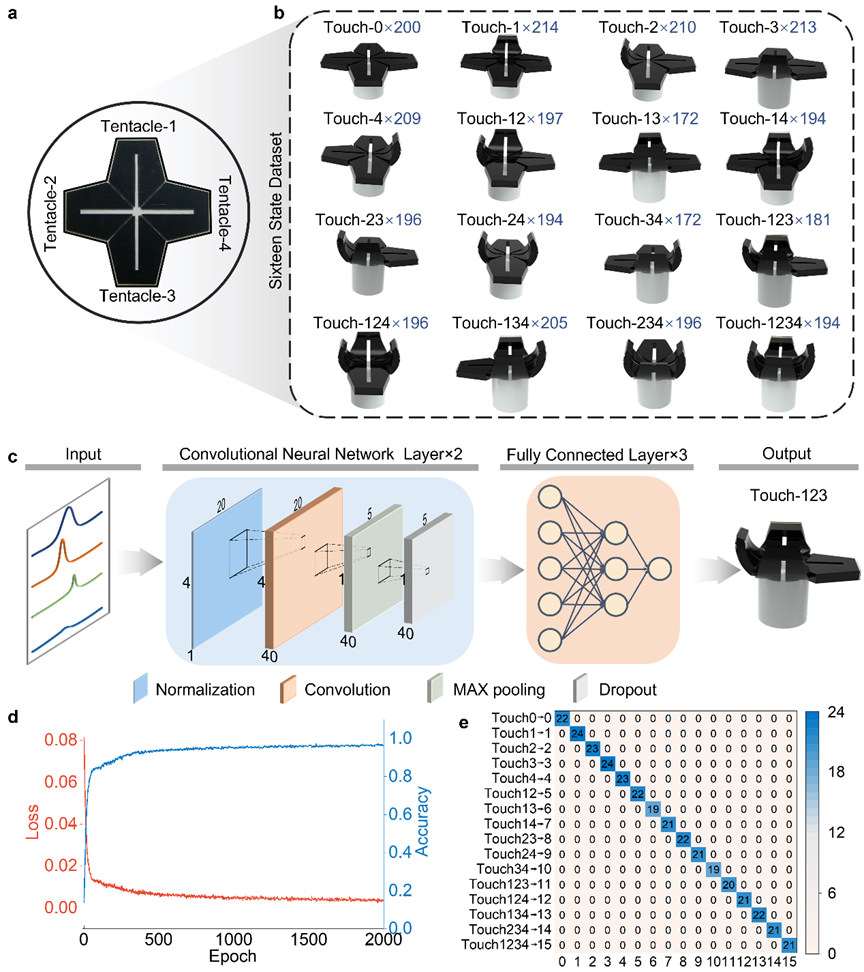
图5 机器学习算法控制SQO实现十六种状态识别
【基于SQO的主动自主物体识别】
在自然界中,生物的感驱一体功能使它们能够主动感知周围环境。海葵通过摆动某些触手来引诱和探测物体,同时通过遍布全身的神经网络来评估这些物体的可食性。随后,海葵协调所有触手的运动,将可食用的物体包围起来。受海葵神经肌肉系统的启发,本文通过整合感知和执行功能实现了一种基于软石墨烯触手的智能闭环人工神经肌肉系统。与传统软体电子中的被动感知不同,SQO具有主动寻找和获取信息的独特能力。该系统通过驱动感知触手,主动感知物体形状。它通过电路向神经网络无线传输感知数据。然后,神经网络自主判断是否应该抓取物体。根据判断信号,电路板驱动触手抓住物体。通过设计传感和驱动功能的控制时序,在数据采集精度和响应速度之间取得平衡,提高主动自主传感的位置识别精度。物体识别利用不同物体之间的形状差异来实现。接触的时间点和紧随其后的触摸反应波形可以提供有关物体形状的信息,从而实现有效的物体识别。作者使用十个形状各异的物体进行了测试,以评估系统的识别能力。在物体分类任务中,SQO的分类准确率达到80.7%,标准差为1.41。使用人手进行物体类别的平均准确率为74.7%,标准差为12.7(n=3)。与人手相比,SQO在物体识别任务中表现出更高的准确率和更一致的识别率。
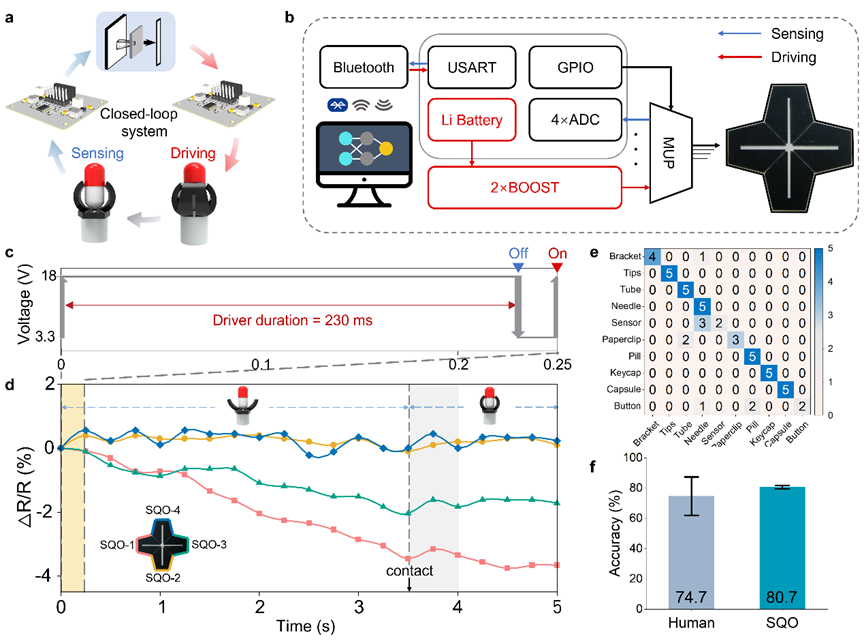
图6 基于状态融合的主动自主物体识别
总结:作者受海葵启发展示了一种智能类软体生物(SQO),它具有感驱一体化触手,能够实现实时状态识别和自主物体识别功能。采用异构机理同位集成(HMHI)新策略,SQO的触手在相同的材料和结构下拥有同时感知形态变化和灵活驱动运动的独特能力。结合机器学习算法和定制电路,作者实现了完整的神经肌肉系统功能,实现自主状态识别能力和主动自主物体识别。改工作提出传感驱动一体的新策略,为实现人工神经肌肉系统提供了一种前景广阔的方法。
以上文章转载于微信公众号高分子科学前沿,如有侵权,请及时联系我们修改或进行删除。
